
Open eVision Studio
평가 및 프로토타이핑 애플리케이션 (업데이트됨)
- 복잡한 처리 순서 생성
- 관심 영역(ROI) 및 유연한 영역에 대한 완벽한 지원
- Open eVision Tools를 위한 포괄적인 구성 패널
- C++, C# 및 Python 코드 생성
- 도구 및 샘플 카탈로그
- eGrabber Studio를 이용한 실시간 이미지 소스 연결
- Windows(10분), Linux, Intel 및 ARM 아키텍처와 호환
- 무료 제공
설명
Open eVision Studio: Open eVision을 학습하고, 프로토타입을 제작하며, 시연할 수 있는 도구
그래픽 인터페이스를 사용하여 복잡한 이미지 처리 시퀀스를 설계할 수 있습니다. 이 도구 모음은 Open eVision 라이브러리의 다양성과 기능을 잘 보여줍니다. 처리 파이프라인에 해당하는 C++, Python 및 C# 소스 코드가 자동으로 생성되며, 이는 Open eVision API에 대한 대화형 문서를 제공합니다.
Open eVision Studio는 GigE Vision 카메라, Coaxlink 프레임 그래버 또는 eGrabber 레코더 시퀀스와 같은 실시간 이미지 소스를 처리할 수 있습니다. 이 애플리케이션은 무료로 제공되며, Windows 및 Linux에서 실행되고 Intel 및 ARM 64비트 아키텍처와 호환됩니다.
현재 버전에는 다음 도구들이 포함되어 있습니다: EasyDeepOCR, EasySpotDetector, EasyImage, EasyColor, EasyFind, EasyMatrixCode, EasyQRCode, EasyClassify, EasySegment, EasyLocate, EasyGauge, Easy3DMatch, Easy3DObject, Easy3DLaserLine, EasyObject, EasyBarCode, EasyMatch.
Legacy Studio 애플리케이션을 포함하는 최신 버전은 Open eVision 26.02.2입니다.
주요 장점
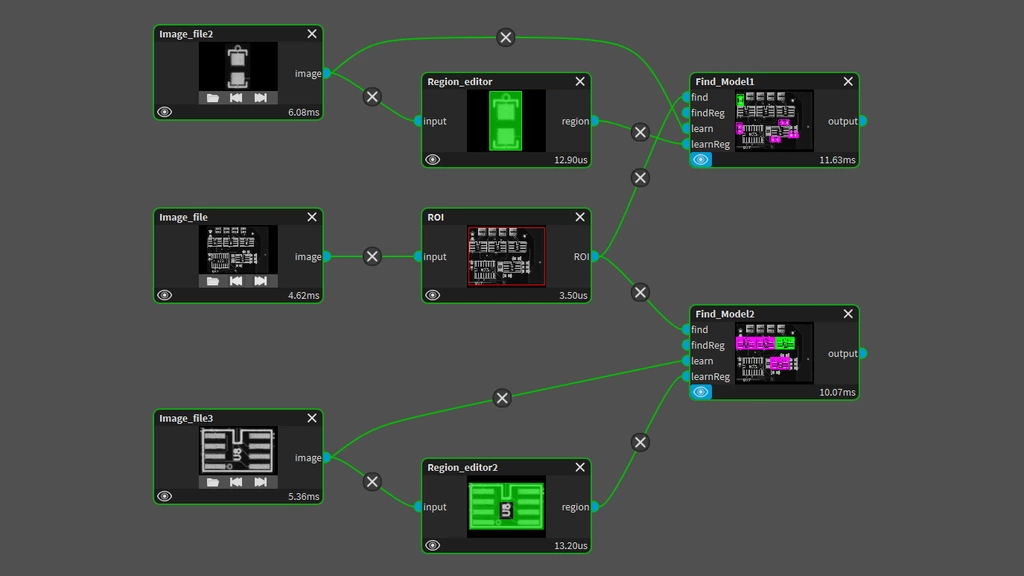
이미지 처리 파이프라인의 그래픽 디자인
그래픽 인터페이스를 사용하여 복잡한 이미지 처리 시퀀스를 설계할 수 있습니다. 사용자는 도구 입력과 출력 사이에 그래픽 링크를 그릴 수 있습니다. Open eVision의 다양한 데이터 유형이 지원됩니다: 이미지, 3D 포인트 클라우드, 임의 영역 등. 그래프는 각 도구의 처리 시간과 전체 그래프의 누적 시간을 표시합니다.
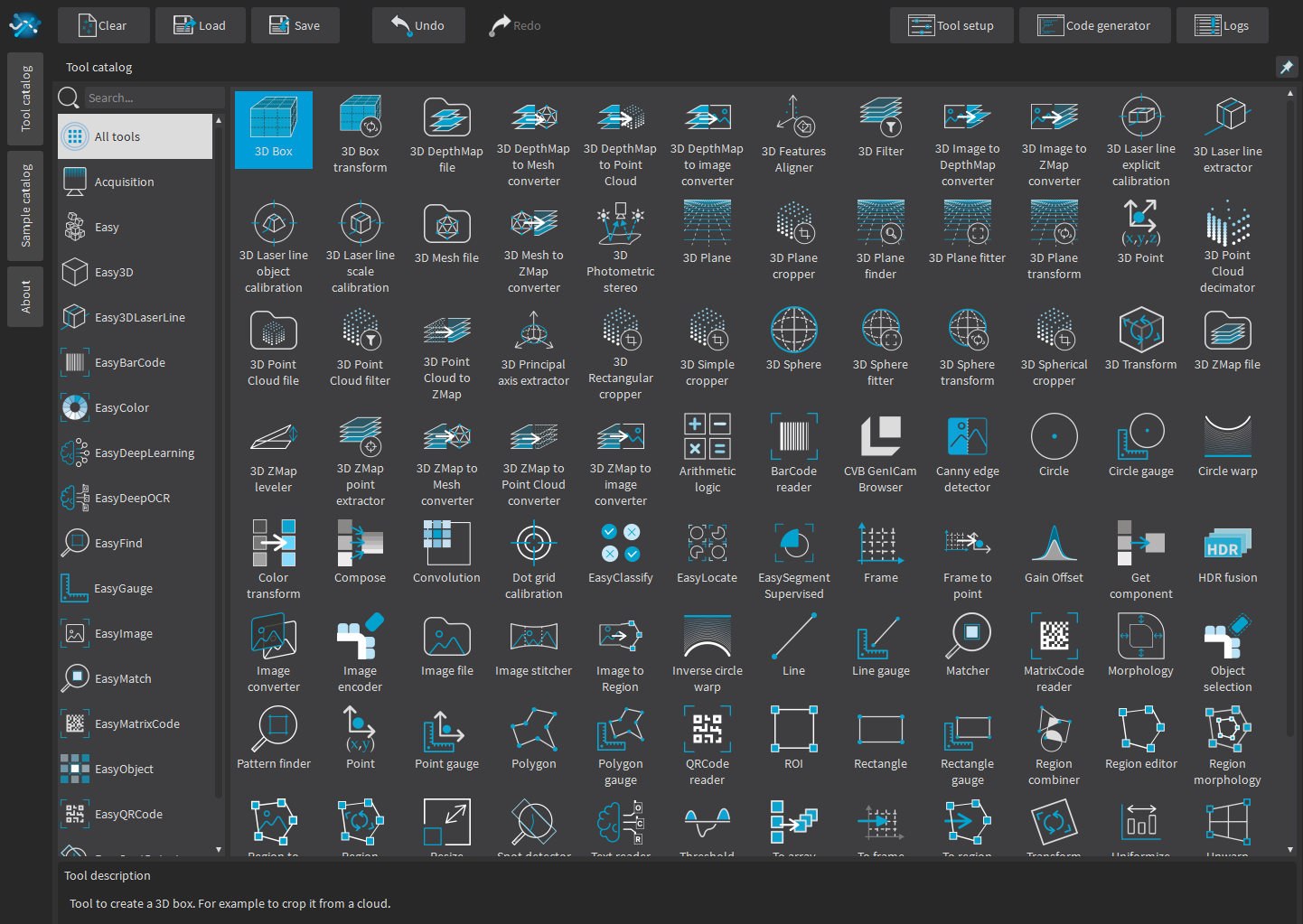
Open eVision의 기능을 소개하는 도구 카탈로그
모든 라이브러리, 즉 딥러닝 및 3D 처리를 포함한 라이브러리는 Open eVision Studio에서 도구로 표시됩니다. 도구 목록은 검색이 가능하며, 각 도구에 대한 설명이 제공됩니다.
3D 데이터 수집 및 처리
Coaxlink Quad 3D-LLE 깊이 맵 획득.
Open eVision Studio는 eGrabber Studio를 통해 Coaxlink Quad 3D-LLE 프레임 그래버에 연결할 수 있습니다. 이 프레임 그래버는 다양한 3D 및 2D 도구로 처리할 수 있는 실시간 깊이 맵을 제공합니다. 여기에는 다른 3D 형식으로의 변환, 보정, 필터링, 정렬, 샘플 간격 조정 등이 포함됩니다.

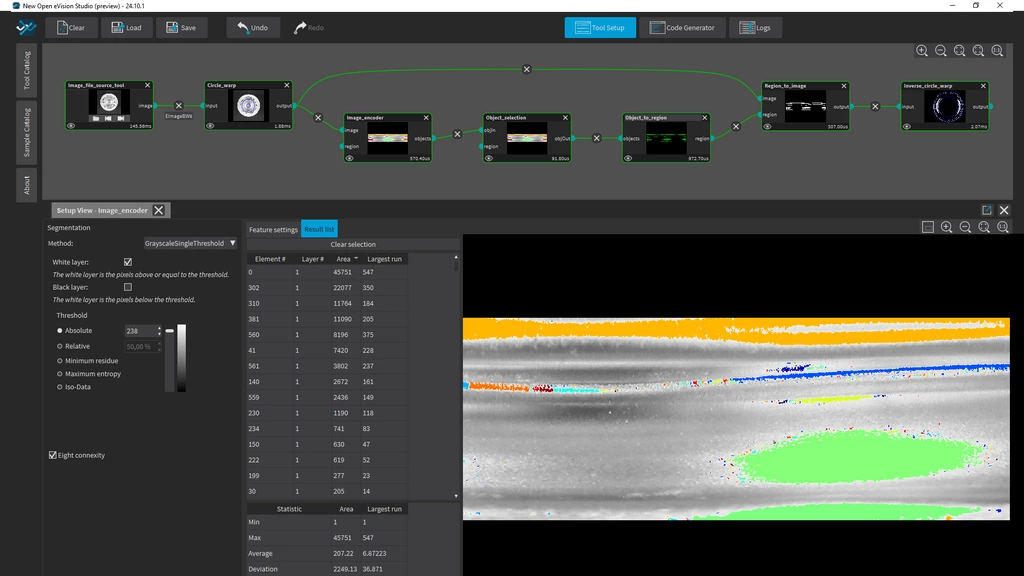
Open eVision Tools를 위한 포괄적인 설정 패널
각 도구별로 전용 설정 패널이 설계되었습니다. 이 패널들은 해당 도구의 다양한 매개변수를 제공하며, 상황에 따라 그래픽 뷰도 표시됩니다. 또한 결과는 종합적인 형식으로 표시됩니다.
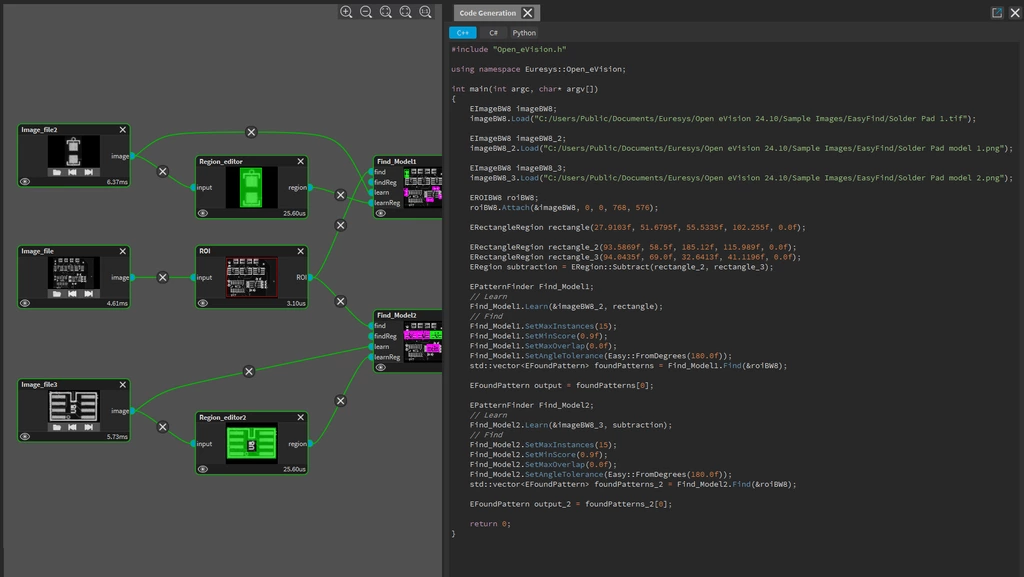
C++, C# 및 Python용 대화형 코드 생성
현재 처리 파이프라인과 툴의 실제 구성에 해당하는 코드가 자동으로 동적으로 생성됩니다. C++, C#, Python 등 세 가지 프로그래밍 언어가 지원됩니다. 이러한 샘플 프로그램을 사용하면 Open eVision Studio에서 설계된 현재 처리 파이프라인을 그대로 재현할 수 있습니다.
모든 도구에 대한 예제 프로젝트가 포함되어 있습니다
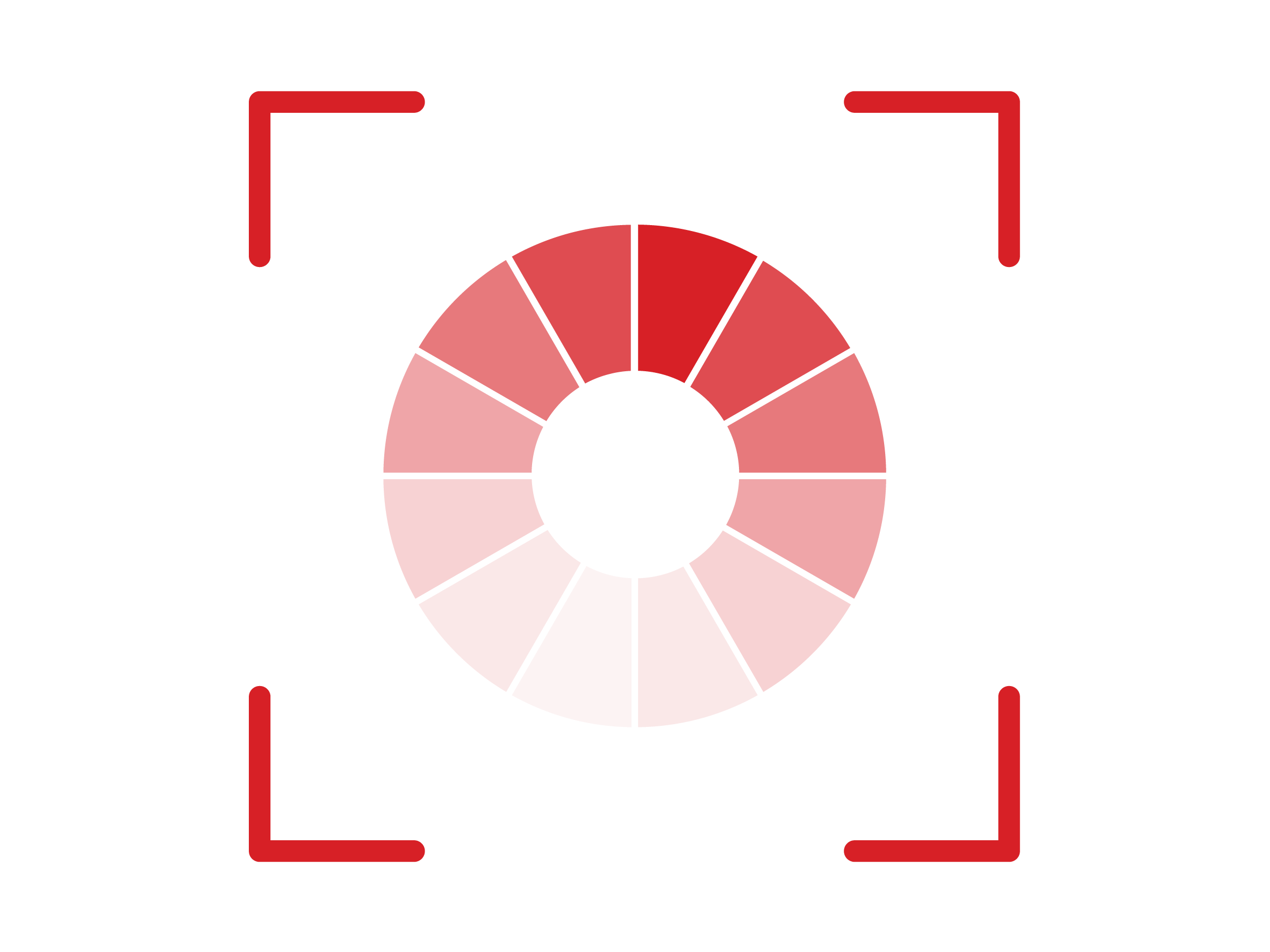
Open eVision Studio에서 샘플 프로젝트 모음을 확인할 수 있습니다. 이 프로젝트들은 Open eVision Tools의 간단한 사용법부터 다소 복잡한 사용법까지 보여줍니다. 각 프로젝트에는 샘플 이미지가 포함되어 있으며, 사용자는 자신의 특정 사용 사례에 맞게 편집할 수 있습니다.
eGrabber Studio를 통한 실시간 영상 획득
New Open eVision Studio에서는 Coaxlink 프레임 그래버, GigE Vision 카메라 또는 녹화 컨테이너와 같은 모든 소스를 사용할 수 있습니다. 매개변수를 동적으로 편집할 수 있으며, 변경 사항은 Open eVision Tools에서 즉시 반영됩니다. GigE Vision 카메라나 eGrabber 레코더 컨테이너를 사용하기 위해 별도의 라이선스가 필요하지 않습니다.



Open eVision 다운로드
