Easy3D
3D Image Processing Library
- Point cloud processing and management
- Flexible ZMap generation
- 3D processing functions for cropping, decimating, fitting and aligning point clouds
- Compatible with many 3D sensors
- Interactive 3D display with the 3D Viewer
Description
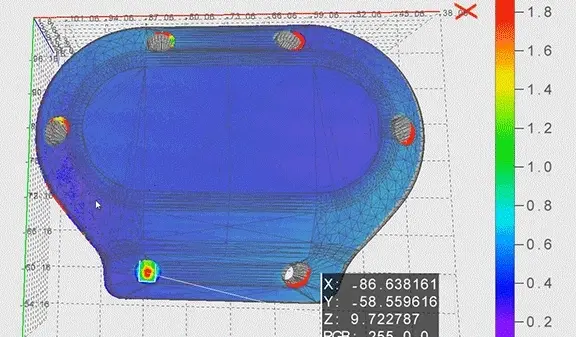
Point Cloud Processing
After calibration, the 3D point cloud contains distortion-free data using a real-world 3D coordinate system. Process 3D point clouds using Easy3D functions such as coordinates transformation, point cloud cropping and decimation, plane finding and fitting or part alignment.

Compatibility With 3D Sensors
The Easy3D library is able to import data from third-party 3D sensors from Automation Technology, Azure Kinect, Benano, Heliotis, IDS Ensenso, Intel Realsense, Lucid Helios, LMI Gocator, Mech-Mind, Nerian Ruby, Photoneo PhoXi, Shenzhen SinceVision (SSZN), Zivid and others. Point Clouds and ZMaps are managed efficiently and allow 3D processing and analysis to be performed.
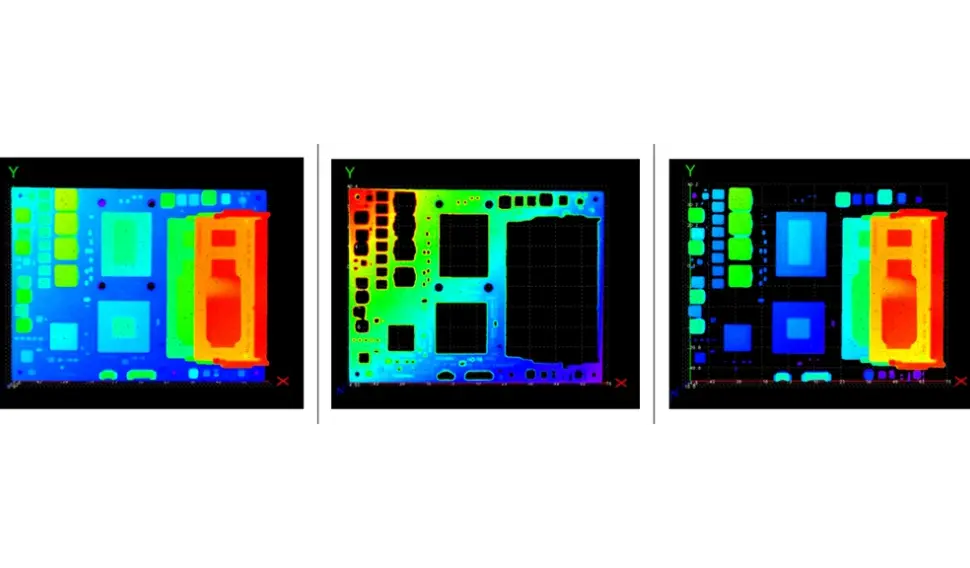
ZMap Generation
A ZMap is the projection of a point cloud on a reference plane, where distances are stored as pixel gray scale values. ZMaps are distortion free, with a metric coordinate system. Easy3D provides functions to generate such ZMaps. More importantly, you can apply all Open eVision 2D processing functions to ZMaps: filtering and thresholding with EasyImage, blob analysis with EasyObject, sub-pixel measurement with EasyGauge, pattern matching with EasyFind and EasyMatch.
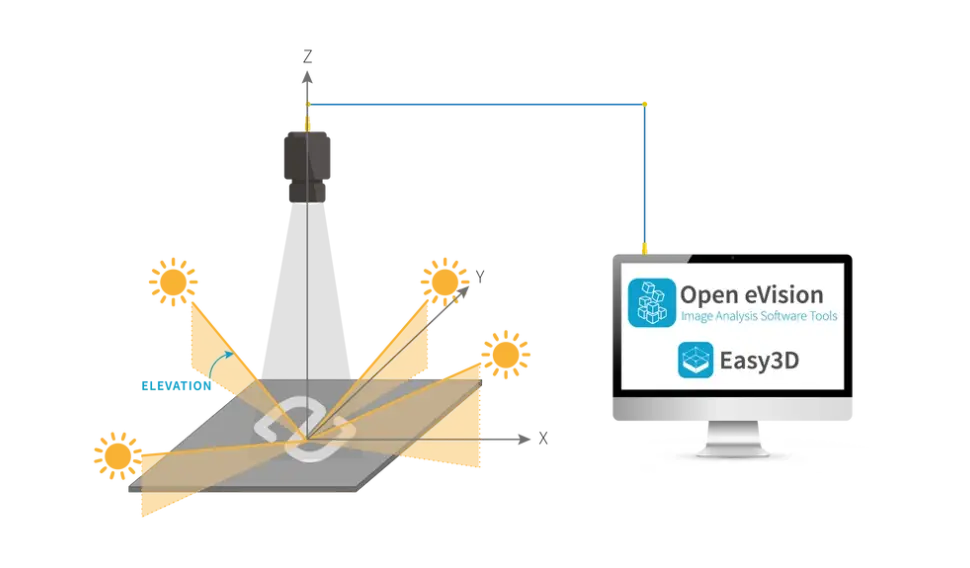
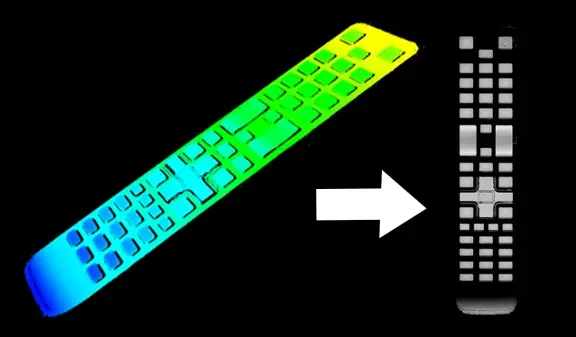
Photometric Stereo For 3D Surface Inspection
The Photometric Stereo function estimates the orientation and albedo of each point of a surface by acquiring several images of the same surface taken from a single viewpoint, but under illumination from different directions. The method is suitable for the inspection of details (defects or information) present on the surface of objects that cannot be seen by a single camera-light pair and reveals small variations in surface curvature or texture. It can be used as a preprocessing phase to other libraries, such as:
- Code reading: EasyMatrixCode, EasyQRCode or EasyBarCode
- Optical character recognition: EasyOCR
- Alignment: EasyMatch, EasyFind
- Measurement: EasyGauge
- Defect detection: EasyObject, EasySegment
Photometric Stereo is available in the Easy3D library.
3D Viewer
Use the 3D Viewer class of Easy3D to create an interactive 3D display. The 3D Viewer can display point clouds and 3D objects. It uses the OpenGL interface and requires a compatible display device.
Other Benefits
Neo Licensing System
Neo is the new Licensing System. It is reliable, state-of-the-art, and is now available to store Open eVision and eGrabber licenses. Neo allows you to choose where to activate your licenses, either on a Neo Dongle or in a Neo Software Container. You buy a license, you decide later.
Neo Dongles offer a sturdy hardware and provide the flexibility to be transferred from a computer to another. Neo Software Containers do not need any dedicated hardware, and instead are linked to the computer on which they have been activated.
Neo ships with its own, dedicated Neo License Manager which comes in two flavours: an intuitive, easy to use, Graphical User Interface and a Command Line Interface that allows for easy automation of Neo licensing procedures.
All eVision Libraries For Windows And Linux
- Microsoft Windows 11, 10 for x86-64 (64-bit) processor architecture
- Microsoft Windows 11, 10 IoT Enterprise on x86_64 systems
- Linux for x86-64 (64-bit) and ARMv8-A (64-bit) processor architectures with a glibc version greater or equal to 2.18

new Open eVision Studio
Complex image processing sequences can be designed using a graphical interface. The collection of tools represents the diversity and the capabilities of the Open eVision libraries. The C++, Python and C# source code, corresponding to the processing pipeline, is automatically generated and provides an interactive documentation of the Open eVision API. The New Open eVision Studio can process live image sources such as a GigE Vision camera, a Coaxlink frame grabber or eGrabber recorder sequences.
This application is free of charge, runs on Windows, Linux and is compatible with Intel and ARM 64-bit architectures.