簡易3D
3D圖像處理函式庫
- 點雲處理與管理
- 靈活的ZMap生成
- 點雲裁切、稀疏化、擬合與對齊的3D處理功能
- 兼容多種3D感測器
- 透過3D檢視器實現互動式3D顯示
描述
點雲處理
校準後,3D點雲將採用真實世界3D座標系統,包含無失真數據。可運用Easy3D功能處理3D點雲,例如座標轉換、點雲裁切與稀疏化、平面尋找與擬合,或零件對齊。

與3D感測器的相容性
Easy3D 函式庫可導入來自 Automation Technology、Azure Kinect、Benano、Heliotis、IDS Ensenso、Intel Realsense、Lucid Helios、LMI Gocator、Mech-Mind、Nerian Ruby、Photoneo PhoXi、深圳森視(SSZN)、Zivid 等第三方 3D 感測器的數據。 點雲與Z圖(ZMaps)皆能高效管理,並支援執行3D處理與分析作業。
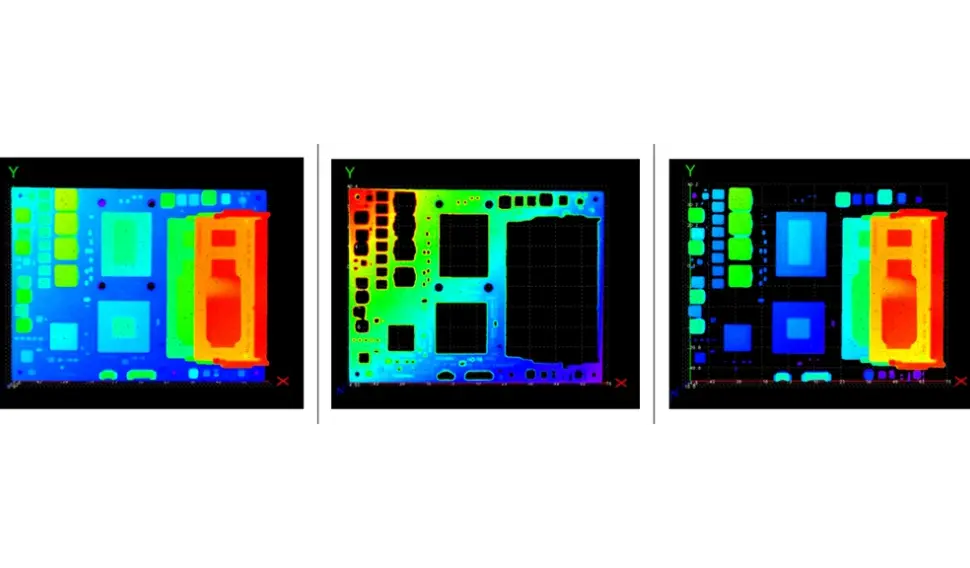
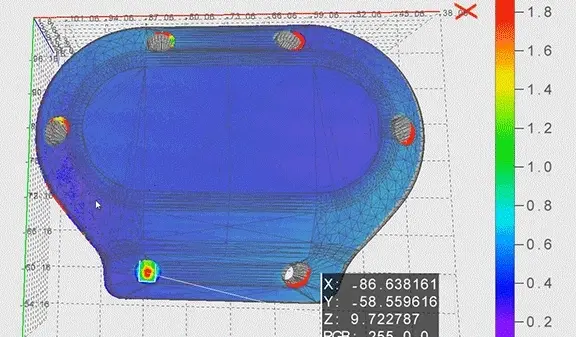
ZMap 生成
ZMap 是將點雲投影至參考平面上的結果,其中距離以像素灰階值儲存。ZMap 具備無失真特性,並採用度量坐標系。 Easy3D提供生成此類ZMap的功能。更重要的是,您可將所有Open eVision 2D處理功能應用於ZMap:透過EasyImage進行濾波與閾值處理、使用EasyObject執行斑塊分析、運用EasyGauge執行次像素測量,以及透過EasyFind與EasyMatch執行圖案匹配。
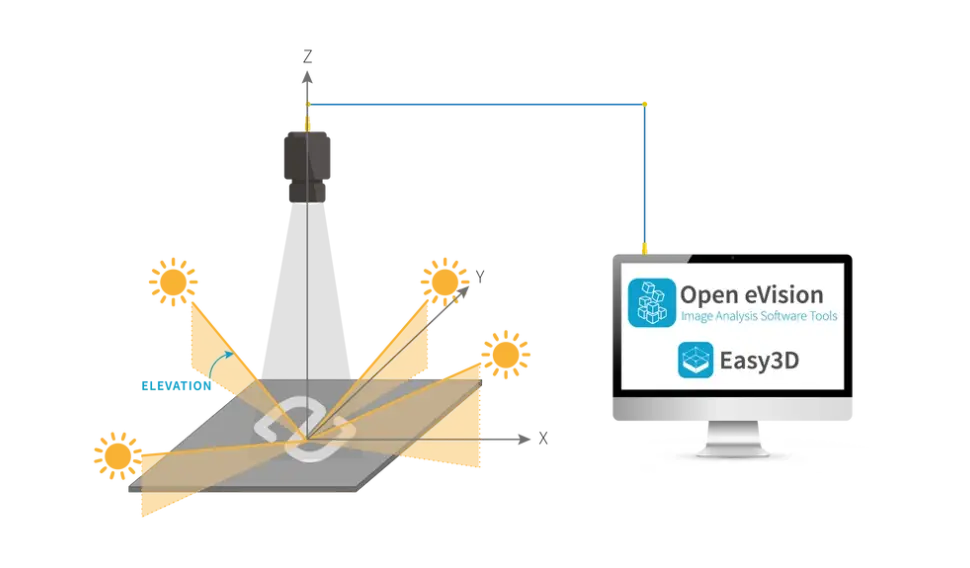
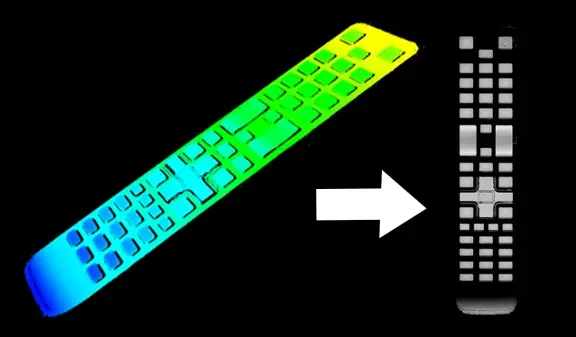
測光立體法用於三維表面檢測
測光立體功能透過從單一視點拍攝同一表面、但採用不同方向照明的多張影像,估算表面各點的方位角與反照率。 此方法適用於檢測單一相機-光源組合無法觀測的物體表面細節(缺陷或資訊),並能揭示表面曲率或紋理的細微變化。可作為其他函式庫的前置處理階段,例如:
- 條碼讀取:EasyMatrixCode、EasyQRCode 或 EasyBarCode
- 光學字元辨識:EasyOCR
- 對齊:EasyMatch、EasyFind
- 測量:EasyGauge
- 缺陷檢測:EasyObject、EasySegment
光學立體測量功能可於 Easy3D 函式庫中使用。
3D 檢視器
使用 Easy3D 的 3D Viewer 類別來建立互動式 3D 顯示器。3D Viewer 可顯示點雲與 3D 物件,採用 OpenGL 介面運作,並需搭配相容的顯示裝置。
其他福利
新授權系統
Neo 是全新的授權系統。它具備可靠性與尖端技術,現已可用於儲存 Open eVision 與 eGrabber 的授權。Neo 允許您選擇授權的啟用位置,無論是 Neo 硬體授權卡或 Neo 軟體容器皆可。您先購買授權,後續再決定啟用方式。
Neo 硬體授權器具備堅固耐用的硬體結構,可靈活在不同電腦間轉移使用。Neo 軟體授權容器則無需專用硬體,而是與其啟用所在的電腦綁定。
Neo隨附專屬的Neo授權管理器,提供兩種操作模式:直覺易用的圖形化使用者介面,以及可自動化執行Neo授權流程的命令列介面。
所有適用於 Windows 與 Linux 的 eVision 函式庫
- Microsoft Windows 11、10 適用於 x86-64 (64 位元) 處理器架構
- Microsoft Windows 11、10 IoT Enterprise 適用於 x86_64 系統
- 適用於 x86-64(64 位元)及 ARMv8-A(64 位元)處理器架構的 Linux,需具備 glibc 2.18 或更高版本

開啟 eVision 3D Studio
Open eVision 3D Studio 是 Open eVision 的 3D 評估與原型製作應用工具。
此應用程式透過 Coaxlink Quad 3D-LLE 影像擷取卡,以及 Easy3D 與 Easy3DLaserLine 函式庫,大幅簡化單一與雙重 3D 雷射線檢測系統的配置流程。
Open eVision 3D Studio 完全免費,無需任何授權許可。