
New Open eVision Studio
评估与原型设计应用程序(更新版)
- 创建复杂的处理序列
- 全面支持感兴趣区域(ROI)和灵活区域
- 提供 Open eVision工具的全面配置面板
- 支持生成 C++、C# 和 Python 代码
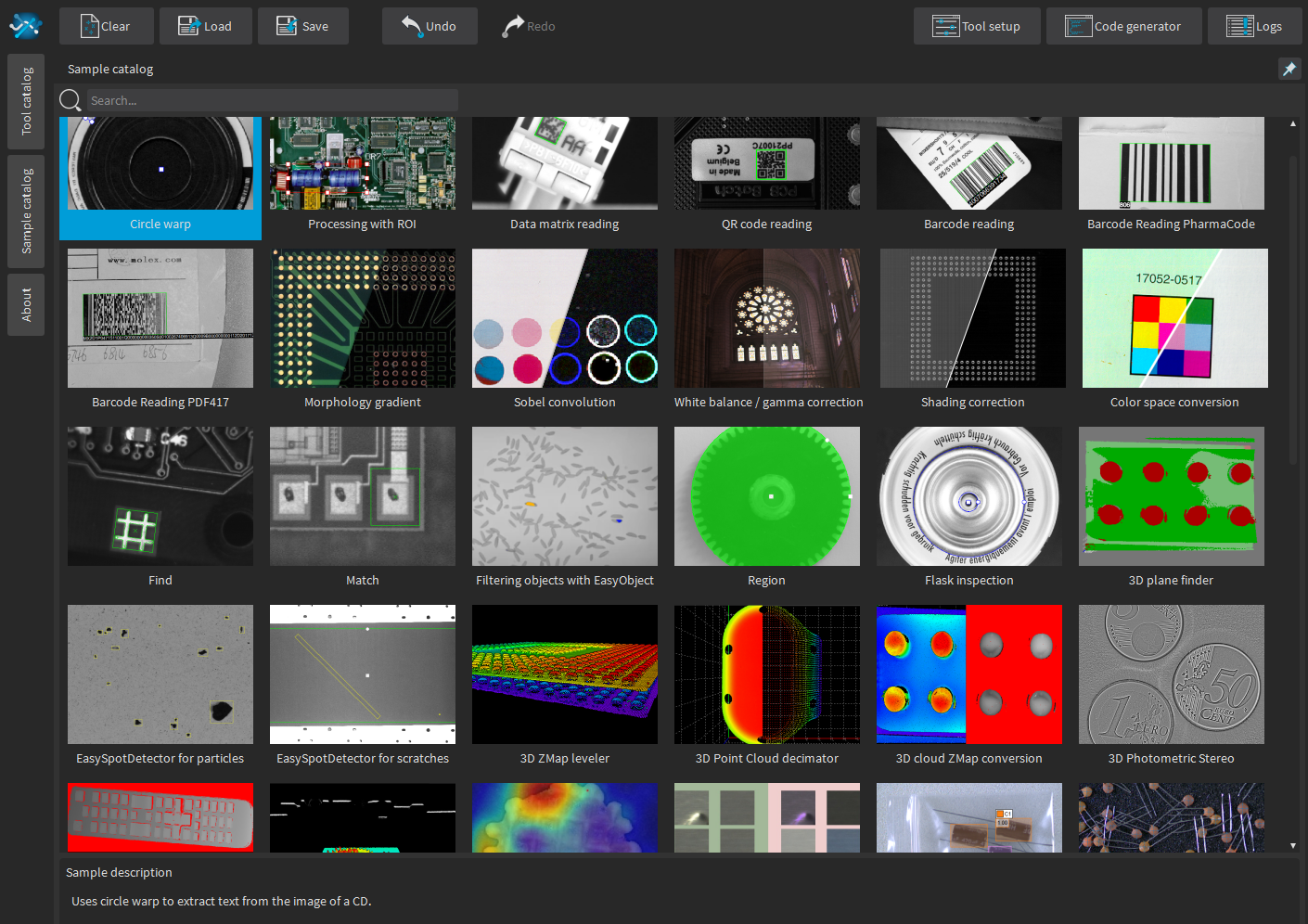
- 工具和示例目录
- 通过 eGrabber Studio 连接实时图像源
- 兼容 Windows(10 分钟)、Linux 以及 Intel 和 ARM 架构
- 免费
描述
New Open eVision Studio:学习、原型开发和演示 Open eVision 的利器
用户可通过图形界面设计复杂的图像处理流程。这套工具集充分展现了 Open eVision 库的多样性和强大功能。系统会自动生成与处理流程对应的 C++、Python 和 C# 源代码,并提供 Open eVision API 的交互式文档。
New Open eVision Studio 可处理实时图像源,例如千兆网 Vision 相机、Coaxlink 图像采集卡或 eGrabber 录像机的序列数据。该应用程序免费提供,可在 Windows、Linux 系统上运行,并兼容 Intel 和 ARM 64 位架构。
当前版本为预览版。未来 Open eVision 的版本中将添加更多工具和功能。
当前版本展示了以下库中的工具:EasyDeepOCR、EasySpotDetector、EasyImage、EasyColor、EasyFind、EasyMatrixCode、EasyQRCode、EasyClassify、EasySegment、EasyLocate、EasyGauge、Easy3DLaserLine、EasyObject、EasyBarCode、EasyMatch 和 Easy3D。
主要优势
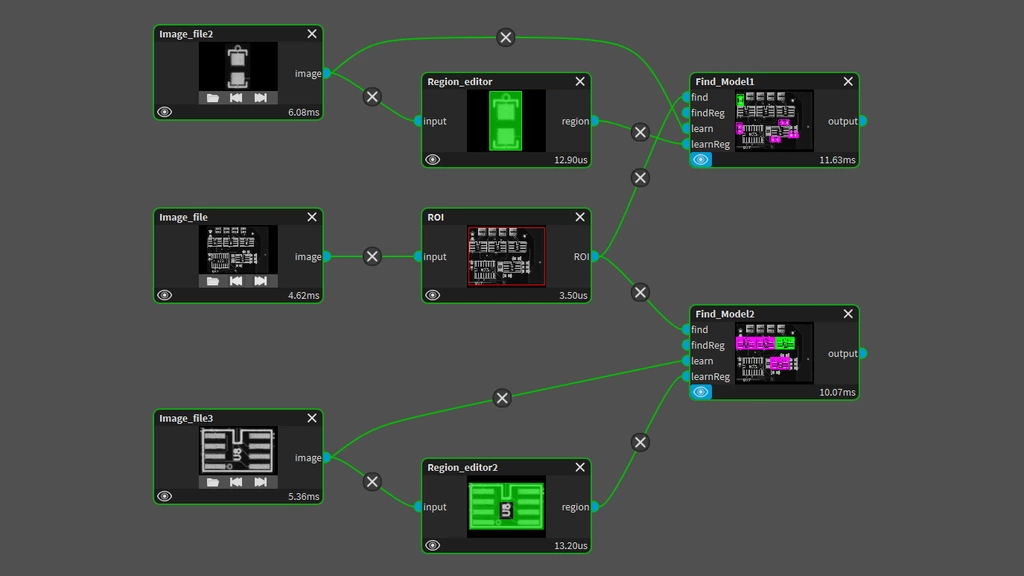
图像处理管道的图形化设计
复杂的图像处理序列可通过图形界面进行设计。用户可在工具的输入端与输出端之间绘制图形化链接。系统支持多种Open eVision数据类型:图像、3D点云、任意区域等。该图形化界面可显示每个工具的处理时间及整个流程的累计时间。
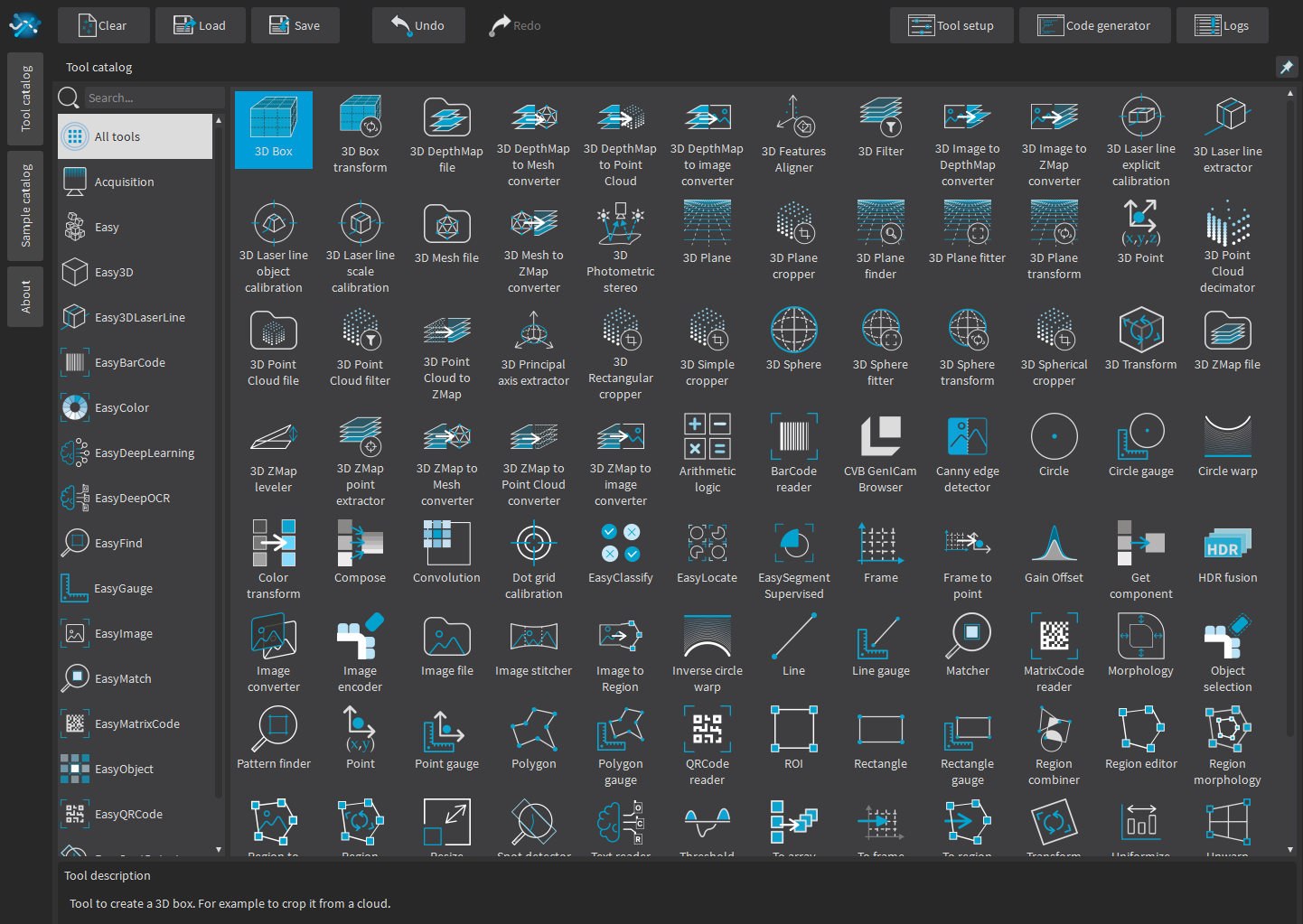
展示 Open eVision 功能的工具目录
所有库(包括深度学习和3D处理库)都将作为工具显示在Open eVision Studio中。工具目录支持搜索功能,且每个工具都附有详细说明。
3D采集与处理
采集 Coaxlink Quad 3D-LLE 深度图。通过 eGrabber
Studio,可将 Open eVision Studio 连接至 Coaxlink Quad 3D-LLE 图像采集卡。该图像采集卡可提供实时深度图,这些深度图可通过一系列 3D 和 2D 工具进行处理,包括转换为其他 3D 格式、校准、滤波、对齐、降采样等……

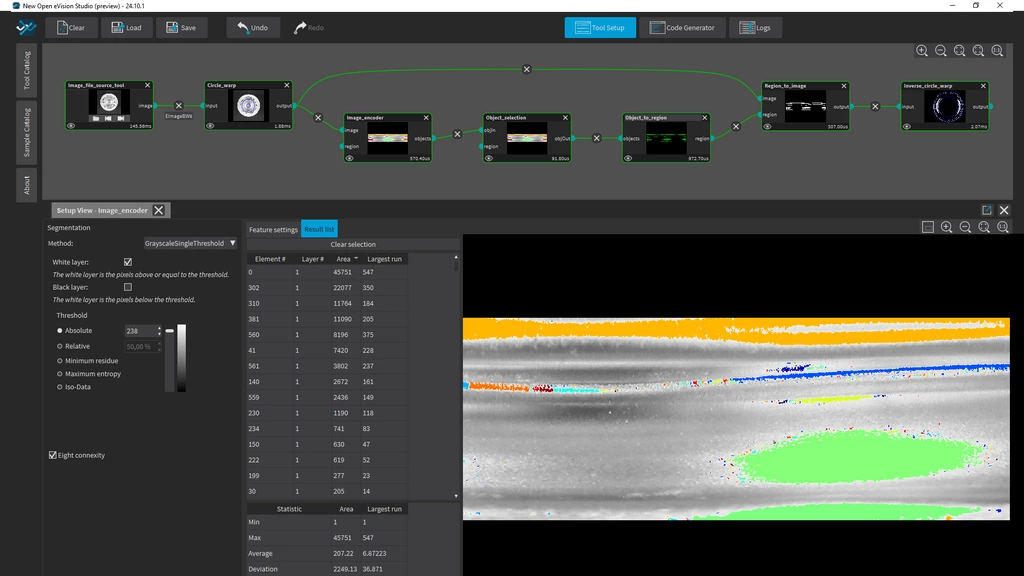
Open eVision工具的综合配置面板
针对每种工具都设计了专用的配置面板。这些面板展示了工具的各项参数,并在合适的情况下提供图形化视图。结果也会以全面的格式呈现。
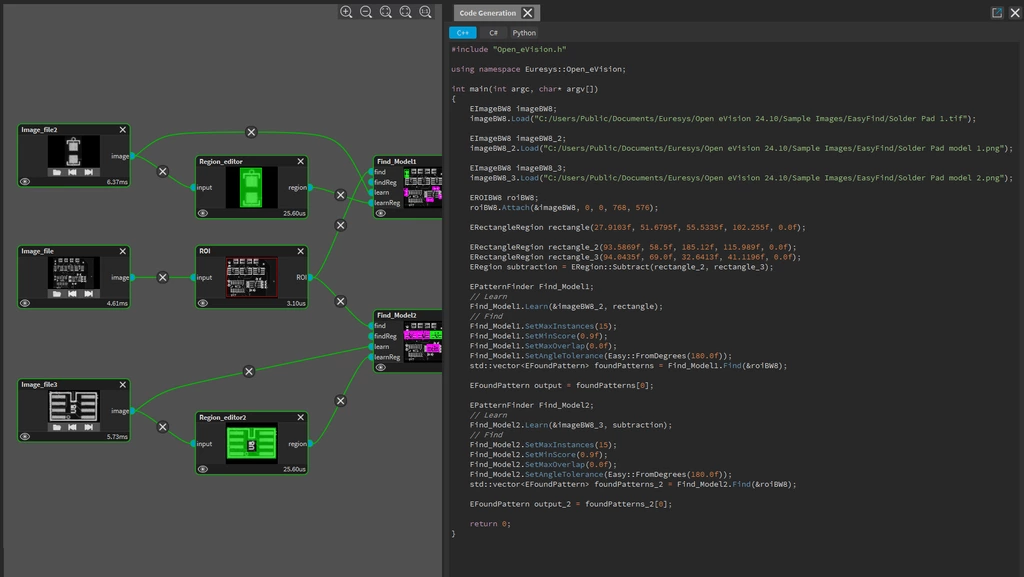
C++、C# 和 Python 的交互式代码生成
与当前处理管道及工具实际配置相对应的代码会自动动态生成。支持三种编程语言:C++、C# 和 Python。这些示例程序可直接用于重现在 Open eVision Studio 中设计的当前处理管道。
随附每种工具的示例项目
Open eVision Studio 中提供了示例项目目录。这些项目展示了 Open eVision工具的简单或复杂用法。它们附带示例图像,用户可以根据具体使用场景进行编辑。
通过 eGrabber Studio 采集实时图像
在 New Open eVision Studio 中,可以使用任何来源的图像,例如 Coaxlink 图像采集卡、GigE Vision 相机或录制容器。参数可动态编辑,且更改内容会立即在 Open eVision工具中显示。使用 GigE Vision 相机或 eGrabber 录制容器无需许可证。




下载 Open eVision
