EasyMatch
模式匹配库
- 基于归一化相关性的模式匹配
- 亚像素级精度
- 支持旋转与缩放
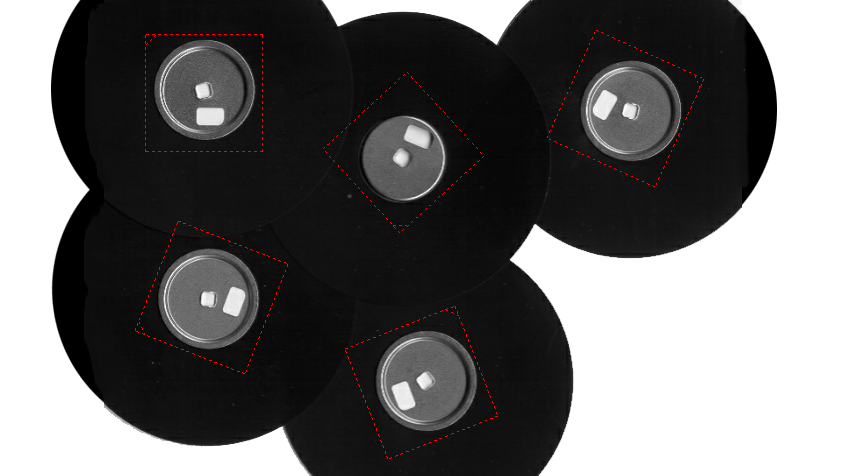
- 多重模式出现检测
- 支持灰度与彩色图像
- 支持"无关区域"处理
描述
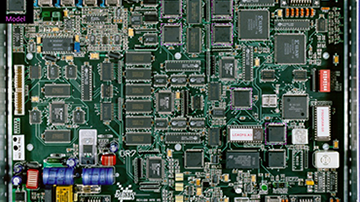
EasyMatch是一款灰度与彩色图案匹配库。它允许用户通过参考图案训练系统,随后在其他图像中定位该图案的出现位置。当未知特定部件在视野中的位置,或需检测部件是否存在时,此工具极为便捷。该库采用归一化相关法工作,即通过测量参考图案与目标图像间的差异实现匹配。
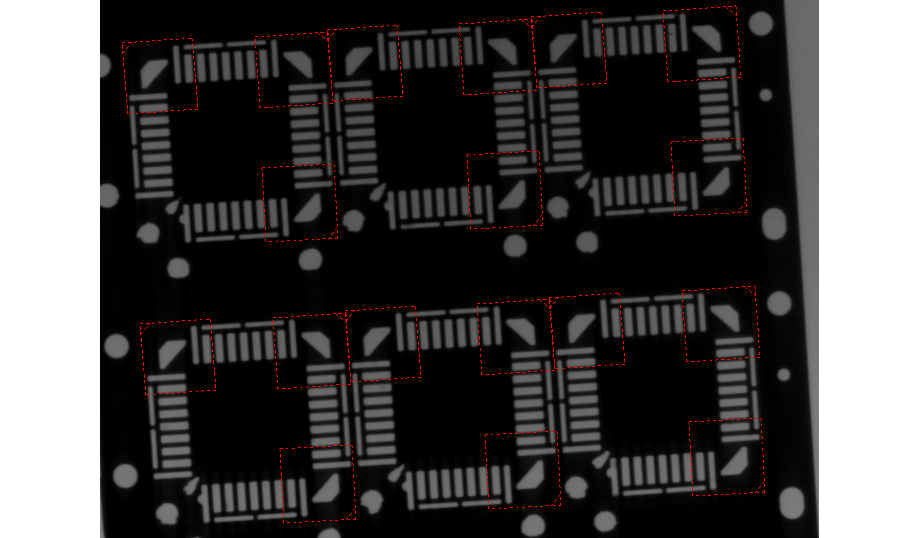
多重模式出现
EasyMatch能够找到多个模式匹配结果,最多可达用户定义的数量。
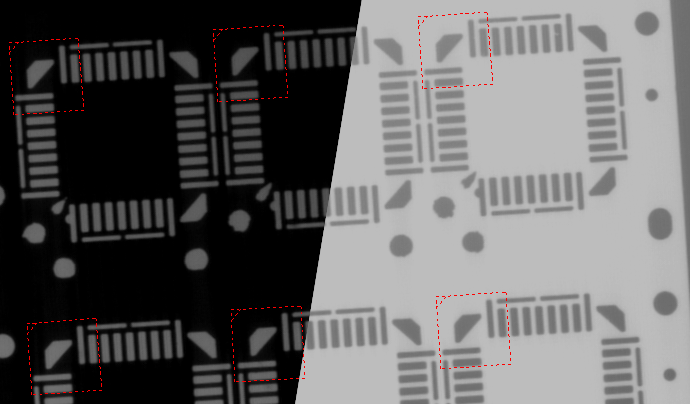
标准相关、偏移归一化相关、增益归一化相关及完全归一化相关
相关性计算基于灰度或彩色图像。为应对图案光照变化,图案图像需进行归一化处理。EasyMatch提供四种归一化模式,具体取决于是否采用灰度增益和/或偏移量补偿。
正常、反常或混合对比
由于特定的光照效果,物体可能呈现反转对比度(即白色背景上的黑色图案,而非黑色背景上的白色图案,或反之)。根据具体应用场景,保留反转实例或忽略它们都可能具有实用价值。系统提供三种对比度模式:仅考虑正向实例、仅考虑负向实例或同时考虑两者。
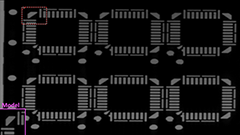
平移、旋转与各向同性/各向异性缩放
为在模式与目标图像间寻找最佳匹配,目标可进行水平与垂直平移。此外,目标还可同时或独立地进行旋转及/或在X、Y方向上改变缩放比例。旋转角度与缩放系数可在用户指定的区间内变化。所有自由度均可任意组合使用。
可变精度,最高可达亚像素级别
图案测量的精度可选(精度越低,速度越快)。可实现十分之一像素的精度。
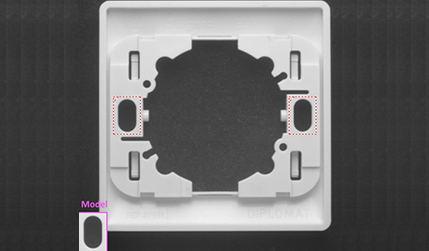
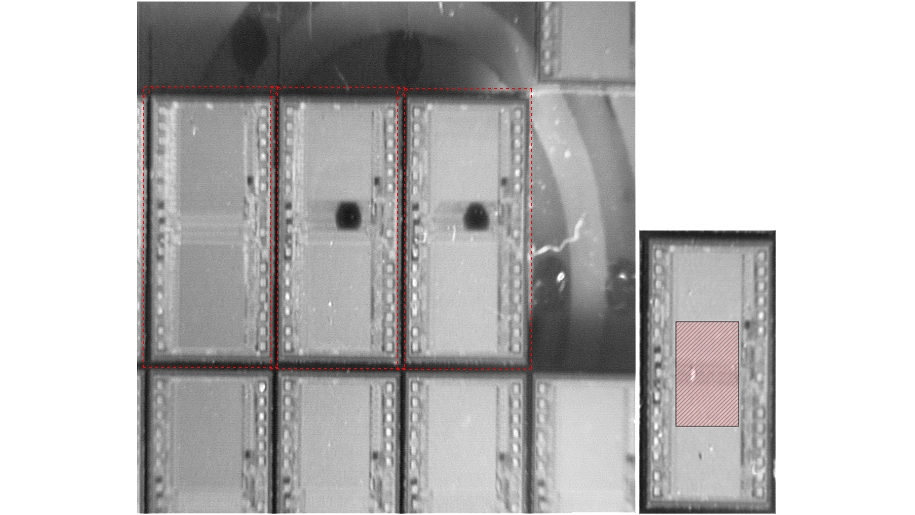
无所谓像素
当图案无法嵌入矩形感兴趣区域时,可通过将阈值以下的像素值设为0来忽略图案周边区域。这些像素将不参与匹配过程。若模板在不同样本间存在局部变化,亦可采用相同处理方式。
灰度图像与彩色图像
EasyMatch 既可处理 8 位灰度图像,也可处理 24 位 RGB 图像。
非方形像素
当图像采用非正方形像素采集时,旋转后的物体会出现变形。考虑像素纵横比可补偿此效应。
其他福利
新许可系统
Neo 是全新的授权系统。它可靠且技术先进,现已支持存储 Open eVision 和 eGrabber 授权。Neo 允许您选择授权激活方式:可通过 Neo 硬件密钥或 Neo 软件容器激活。购买授权后,您可随时决定激活方式。
Neo加密狗提供坚固的硬件支持,可灵活转移至不同计算机使用。Neo软件容器无需专用硬件,仅与激活所在的计算机绑定。
Neo自带专属许可证管理器,提供两种操作模式:直观易用的图形用户界面,以及可轻松自动化Neo许可证流程的命令行界面。
适用于Windows和Linux的所有Open eVision库
- Microsoft Windows 11、10 适用于 x86-64(64 位)处理器架构
- Microsoft Windows 11、10 IoT Enterprise 适用于 x86_64 系统
- 适用于 x86-64(64 位)和 ARMv8-A(64 位)处理器架构的 Linux,需使用 glibc 2.18 及以上版本

Open eVision Studio
Open eVision Studio 是 Open eVision 的评估、原型设计与开发工具。
其直观的图形用户界面支持调用 eVision 的任意 2D 图像处理功能,并即时显示处理结果。脚本功能可生成对应代码,用户可直接复制粘贴至应用程序中。
Open eVision Studio 完全免费(需搭配 Open eVision 2.0 及以上版本使用),且无需任何许可证。
Software
- Host PC Operating System
-
Open eVision is a set of 64-bit libraries that require an Intel compatible processor with the SSE4 instruction set or an ARMv8-A compatible processor.
Open eVision can be used on the following operating systems:
Microsoft Windows 11, 10 for x86-64 (64-bit) processor architecture
Microsoft Windows 11, 10 IoT Enterprise for x86-64 systems
Linux for x86-64 (64-bit) and ARMv8-A (64-bit) processor architectures with a glibc version greater or equal to 2.18
Remote connections
Remote connections are allowed using remote desktop, TeamViewer or any other similar software.
Virtual machines
Virtual machines are supported. Microsoft Hyper-V, Oracle VirtualBox and libvirt hypervisors have been successfully tested.
Only the Neo Licensing System is compatible with virtualization.
Minimum requirements:
2 GB RAM to run an Open eVision application
8 GB RAM to compile an Open eVision application
Between 100 MB and 2 GB free hard disk space for libraries, depending on selected options.
- APIs
-
Supported programming languages :
The Open eVision libraries and tools support C++, Python and the programming languages compatible with the .NET (C#, VB.NET)
C++ requirements: A compiler compatible with the C++ 11 standard is required to use Open eVision
Python requirements: Python 3.11 or later is required to use the Python bindings for Open eVision
.NET requirements: .NET framework 4.8 (or later) or the .NET platform 6.0 (or later) are supported
Supported Integrated Development Environments:
Microsoft Visual Studio 2017 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2019 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2022 (C++, C#, VB .NET, C++/CLI)
QtCreator 4.15 with Qt 5.12
Ordering Information
- Product status
-
Released
- Product code - Description
-
PC4153 Open EasyMatch for USB dongle
PC4303 Open eVision EasyMatch
- Related products
-
PC6512 eVision/Open eVision USB Dongle (empty)
PC6514 Neo USB Dongle (empty)