Kudan社について
Kudan社は、2011年に英国ブリストルで創業した、商用レベルのSLAM技術のパイオニアです。同社は、世界有数の独立系SLAM企業として、高精度で堅牢、かつエネルギー効率の高い自己位置推定とマッピングを実現できるよう、先進的なコンピュータービジョン、AI、センサーフュージョン技術を活用した独自のアルゴリズムを提供しています。Kudan社の詳細についてはこちら。
Kudan社製GRAND SLAMの主要な特徴
- 自律走行型モバイル関連の製品開発において、迅速な統合とスムーズな機能評価・性能評価が可能。
- カメラ(視覚)、2D/3Dライダーを単独または組み合わせて、センチメートル単位のマッピングと自己位置推定に対応する、独自のセンサーフュージョン技術。
- 変化する風景や動的な被写体に対して堅牢なAIベースのアルゴリズムに基づいたSLAM。
- 迅速かつ堅牢なマッピング工程と、費用対効果の高い、大規模なシステムの導入と運用を可能にするマップ処理機能。
- 幅広いハードウェアアーキテクチャとハードウェアアクセラレーションを可能にするクロスプラットフォーム対応。
- エッジデバイスから中央クラウドプラットフォームに至る、柔軟性のあるSLAMソフトウェア展開オプション。
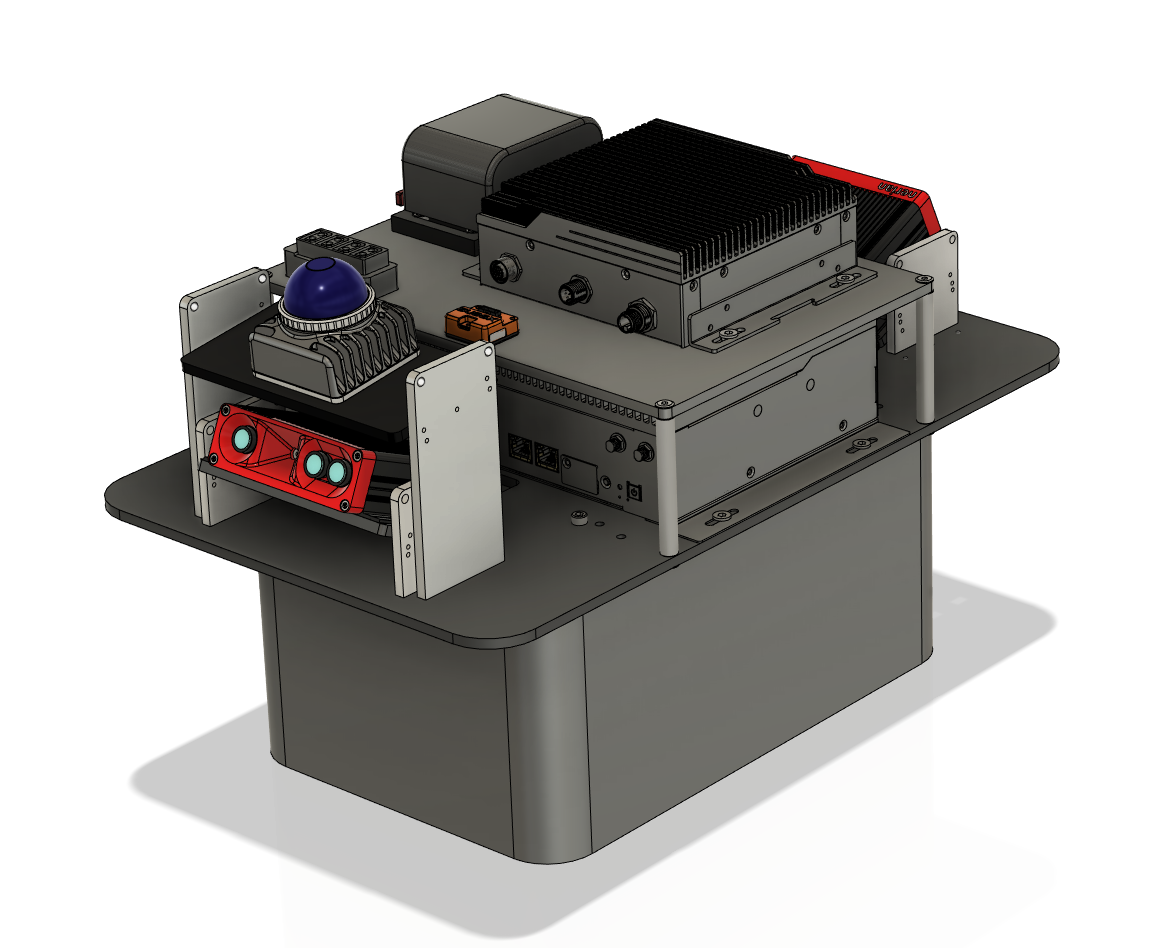
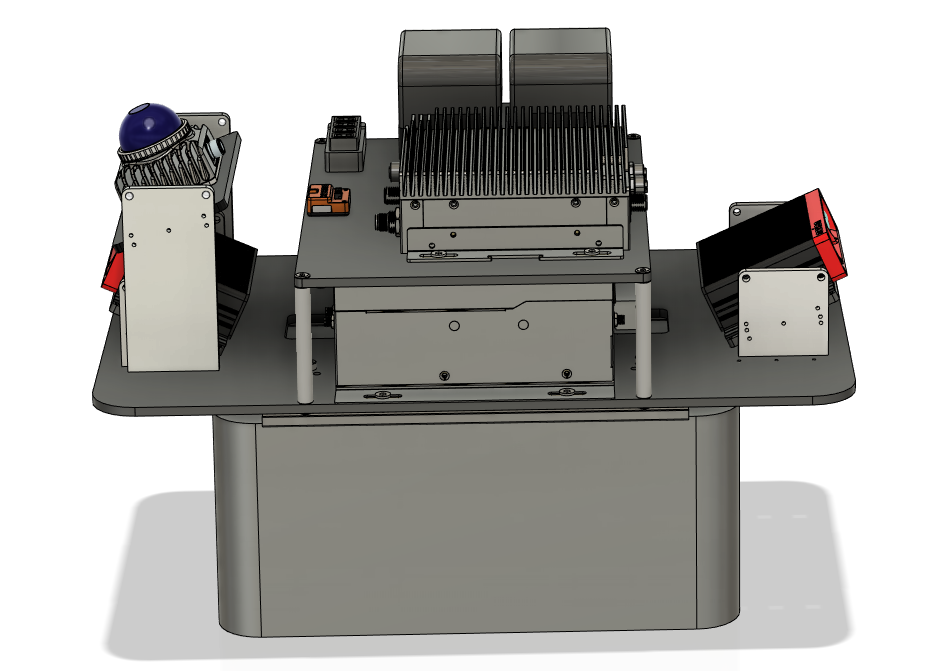
モバイルロボット開発キット
Kudan社製モバイルロボット開発キット(MRDK)は、ハードウェアとソフトウェアの統合パッケージであり、Kudan社製GRAND SLAMを含む先進的なナビゲーション技術を使用して、製品開発サイクルを短縮することを目的としています。 同開発キットはモジュールアーキテクチャに基づき、交換可能なコンポーネントを搭載しているため、お客様は必要に応じて最適にセンサーをセットアップでき、独自の技術コンポーネントを検証できます。
Kudan社製MRDKの主要な特徴
- 迅速な統合と、スムーズな機能評価・性能評価が可能。
- お客様独自のモバイルロボットハードウェアベースへの組み込みも、ROS対応のモバイルロボットベースと組み合わせたご購入も可能。
- 1台または2台のRuby 3Dカメラ、産業用演算ユニット、信頼性の高いデータ処理が可能な時間同期ユニットから構成。2D/3Dライダー、独立IMU、RTK-GNSSセンサーモジュールをオプションで追加可能。
- 複数のチップセットアーキテクチャに対応、X86およびArm/Jetsonに準拠。
- ROS1およびROS2の両ROSに対応。