Kudan and Allied Vision
A new exciting collaboration between Kudan and Allied Vision. The Kudan Grand SLAM software will now support the Nerian Ruby 3D depth camera and is available as part of Kudan’s Mobile Robot Development Kit for Autonomous Mobile Robots.
Simultaneous Localization and Mapping (SLAM) is the fundamental technology that addresses the challenge of enabling robots to navigate and understand their positions and surroundings autonomously. This technology is crucial for mobile robots, such as autonomous vehicles and drones, because it enables them to operate in unknown or dynamic environments. By integrating sensor data, such as 3D depth cameras, 2D or 3D LiDARs and inertial measurement units, SLAM algorithms help robots build a coherent map of the environment and continuously update their position within it.
Who is Kudan?
Kudan, established in Bristol, UK in 2011, pioneers commercial-grade Simultaneous Localization and Mapping (SLAM) technology. As the leading independent SLAM firm globally, Kudan provides proprietary algorithms, utilizing advanced computer vision, AI, and sensor fusion for precise, robust, and energy-efficient localization and mapping. More about Kudan.
What is Kudan Grand SLAM?
The Kudan Grand SLAM software enables mobile robots and vehicles to understand where they are, how they are moving and to structure their environment in dynamic and challenging situations, both for indoor and outdoor. While supporting a flexible sensor setup, it provides reliable performance to a wide range of industries and applications, including mission-critical systems.
Key characteristics of Kudan Grand SLAM include
- Enables fast integration and smooth functional and performance evaluation in autonomous mobility related product development
- Proprietary sensor fusion technology, supporting centimeter level mapping and localization accuracy with camera (visual), 2D/3D-Lidar in standalone or in combination
- SLAM with AI-based algorithm that is robust to scenery changes and dynamic objects
- Fast and robust mapping process, and map handling features for cost-effective, large-scale system deployment and operation
- Cross-platform support for a wide range of hardware architecture and HW acceleration
- Flexible SLAM software deployment options, from edge devices to central cloud platforms
Benefits of Nerian Ruby in combination with Kudan Grand SLAM
With our Nerian Ruby 3D depth camera, we combine all the required hardware and vision features that are needed for autonomous robot navigation:
- 2 cameras in one device: RGB images and 3D depth data as point clouds
- Compatibility for sensor data fusion
- Frame rates up to 60 fps
- Integrated IMU for orientation, no additional hardware needed
- Multi-camera time synchronizations
- Low energy consumption
- Stable calibration and automatic re-calibration during runtime.
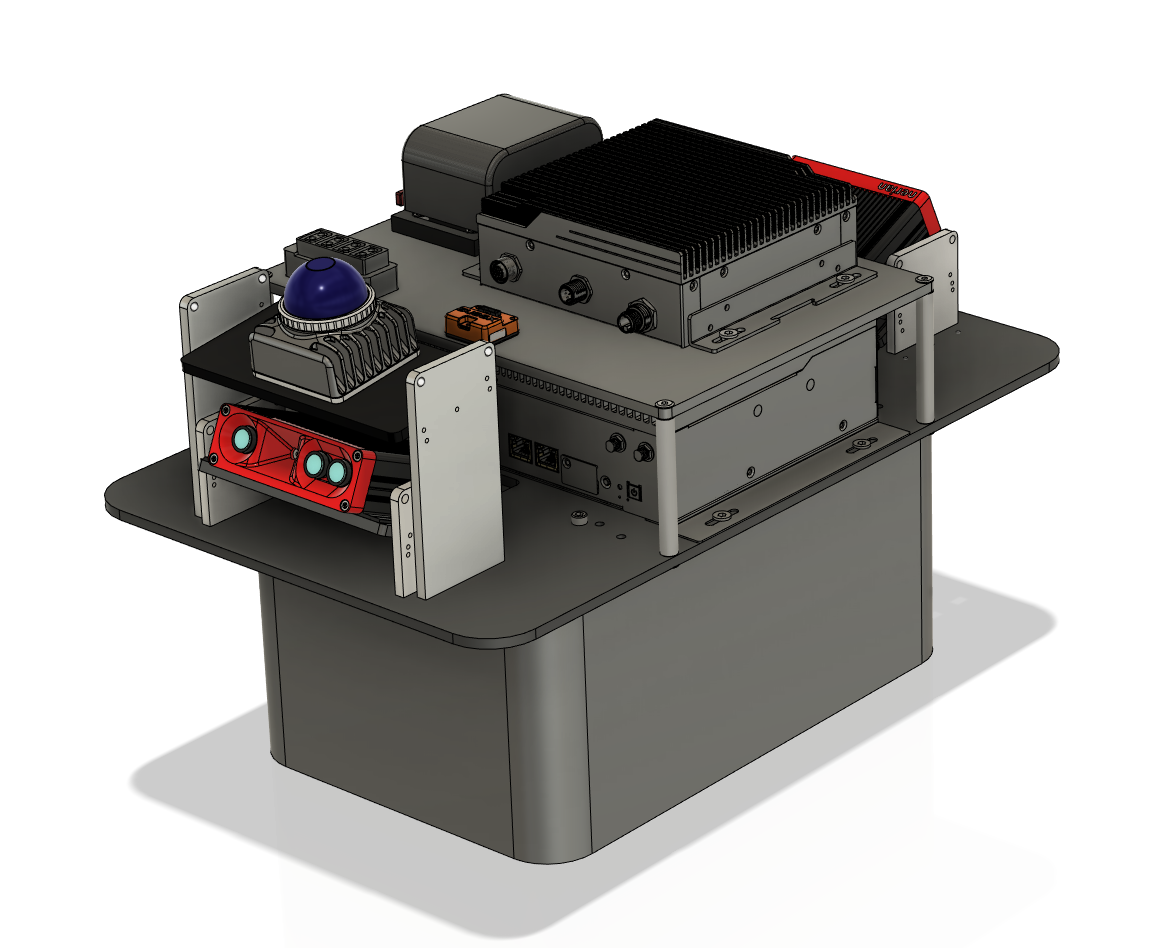
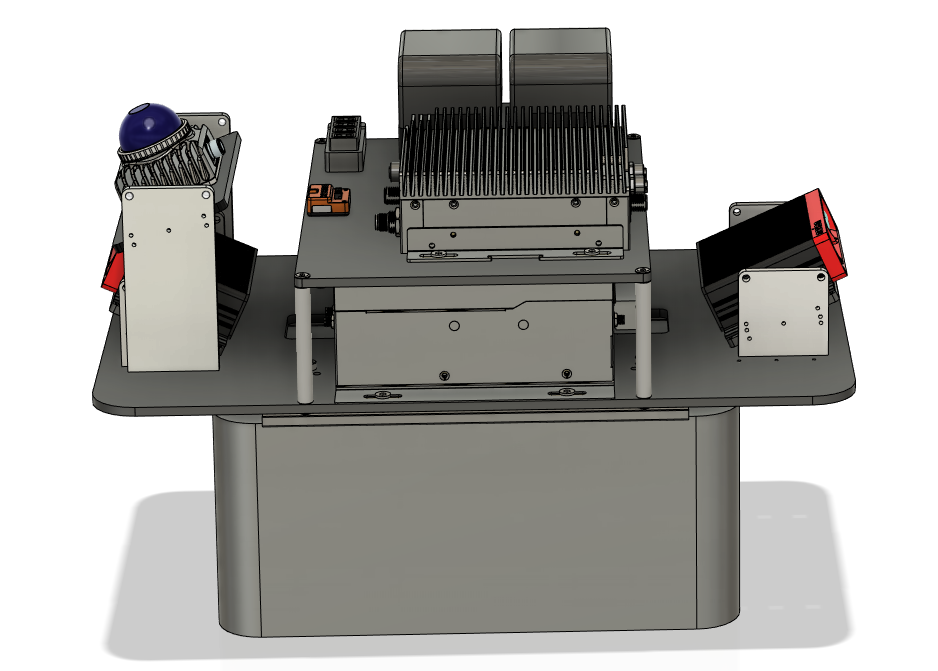
The Mobile Robot Development Kit
Kudan’s Mobile Robot Development Kit (MRDK) is a hardware-software integrated package that aims to shorten product development cycles with advanced navigation technology, including Kudan Grand SLAM. It is based on a modular architecture with replaceable components, so customer can validate optimal sensors setup and their own technical components as needed.
Some key characteristics of Kudan MRDK include:
- Enables fast integration and smooth functional and performance evaluation
- Can be integrated with the customer’s own mobile robot hardware base or be provided with any ROS-compliant mobile robot base
- Consists of one or two Ruby 3D cameras, an industrial grade computing unit and a time synchronization unit for reliable data processing. 2D/3D-LiDARs, independent IMU and RTK-GNSS sensor modules can be added as optional components
- Supports multiple chipset architecture, X86 and Arm/Jetson compliant
- Supports ROS, including both ROS1 and ROS2


Contact our experts now!