“Simultaneous Localization and Mapping (SLAM)” ist die grundlegende Technologie, die es Robotern ermöglicht, autonom zu navigieren und ihre Position und Umgebung zu verstehen. Diese Technologie ist für mobile Roboter wie autonome Fahrzeuge und Drohnen von entscheidender Bedeutung, da sie es ihnen ermöglicht, in unbekannten oder dynamischen Umgebungen zu arbeiten. Durch die Integration von Sensordaten wie 3D-Tiefenkameras, 2D- oder 3D-LiDARs und inertiale Messeinheit (IMU) helfen SLAM-Algorithmen den Robotern, eine kohärente Karte der Umgebung zu erstellen und ihre Position darin kontinuierlich zu aktualisieren.
Wer ist Kudan?
Kudan wurde 2011 in Bristol, Großbritannien, gegründet und leistet Pionierarbeit bei der kommerziellen Technologie für “Simultaneous Localization and Mapping (SLAM)”. Als weltweit führendes unabhängiges SLAM-Unternehmen bietet Kudan eigene Algorithmen, die fortschrittliche Computer Vision, KI und Sensorfusion für präzise, robuste und energieeffiziente Lokalisierung und Kartierung nutzen. Mehr über Kudan.
Was ist Kudan Grand SLAM?
Die Kudan Grand SLAM-Software ermöglicht es mobilen Robotern und Fahrzeugen, zu verstehen, wo sie sich befinden, wie sie sich bewegen und ihre Umgebung in dynamischen und schwierigen Situationen zu strukturieren, sowohl in Innenräumen als auch im Freien. Sie unterstützt ein flexibles Sensor-Setup und bietet zuverlässige Leistung für ein breites Spektrum von Branchen und Anwendungen, einschließlich unternehmenskritischer Systeme.
Die wichtigsten Merkmale von Kudan Grand SLAM
- Ermöglicht eine schnelle Integration und eine reibungslose Funktions- und Leistungsbewertung bei der Entwicklung von Produkten für die autonome Mobilität
- Proprietäre Sensorfusionstechnologie, die eine zentimetergenaue Kartierung und Lokalisierung mit Kamera (visuell), 2D/3D Sensorik allein oder in Kombination unterstützt
- SLAM mit KI-basiertem Algorithmus, der robust gegenüber Veränderungen der Landschaft und dynamischen Objekten ist
- Schneller und robuster Kartierungsprozess und Kartenbearbeitungsfunktionen für kosteneffiziente, groß angelegte Systembereitstellung und -betrieb
- Plattformübergreifende Unterstützung für eine breite Palette von Hardware-Architekturen und HW-Beschleunigung
- Flexible SLAM-Software-Einsatzoptionen, von Edge-Geräten bis zu zentralen Cloud-Plattformen
Vorteile von Nerian Ruby in Kombination mit Kudan Grand SLAM
Mit unserer Nerian Ruby 3D-Tiefenkamera kombinieren wir alle erforderlichen Hardware- und Bildverarbeitungsfunktionen, die für die autonome Roboternavigation erforderlich sind:
- 2 Kameras in einem Gerät: RGB-Bilder und 3D-Tiefendaten als Punktwolken
- Kompatibilität für Sensordatenfusion
- Bildraten bis zu 60 fps
- Integrierte IMU zur Orientierung, keine zusätzliche Hardware erforderlich
- Zeitsynchronisation mehrerer Kameras
- Niedriger Stromverbrauch
- Stabile Kalibrierung und automatische Re-Kalibrierung während der Laufzeit.
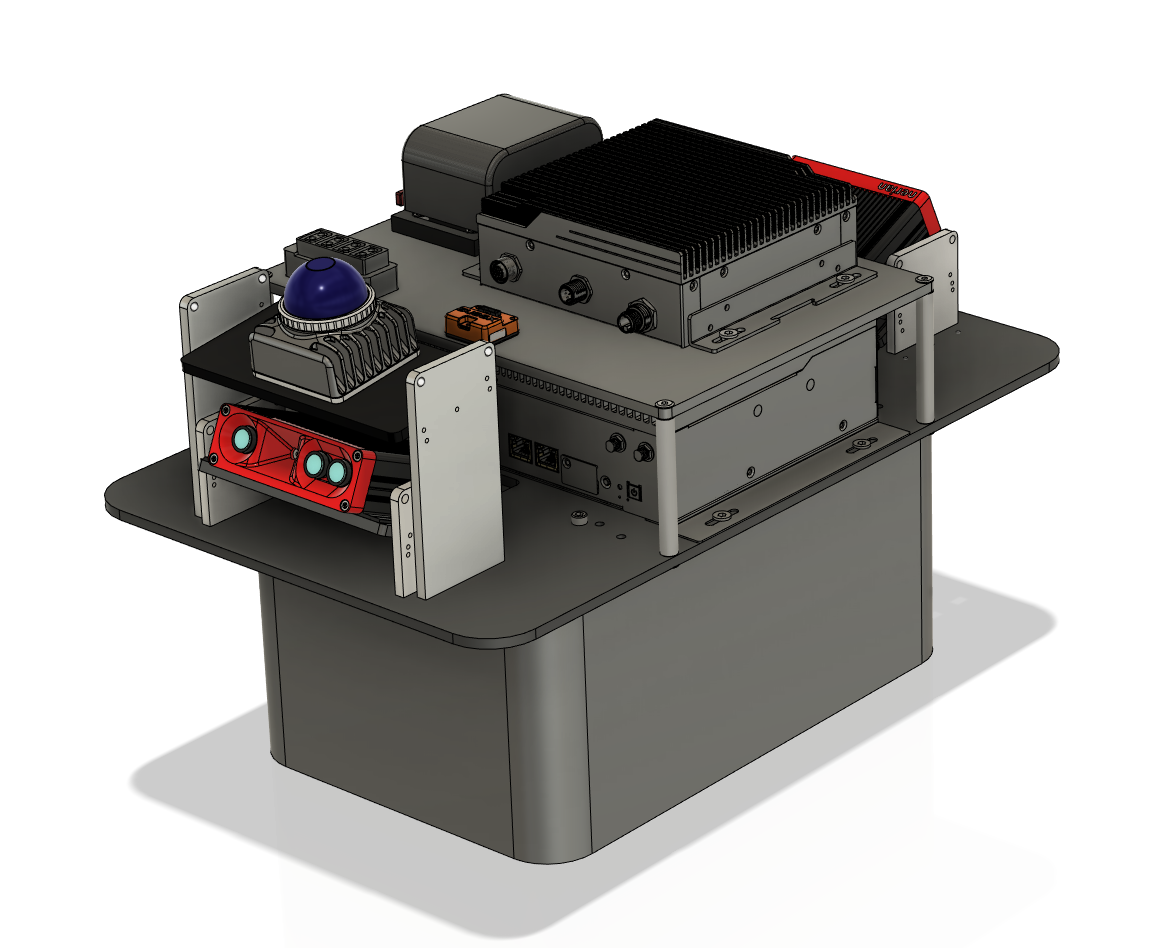
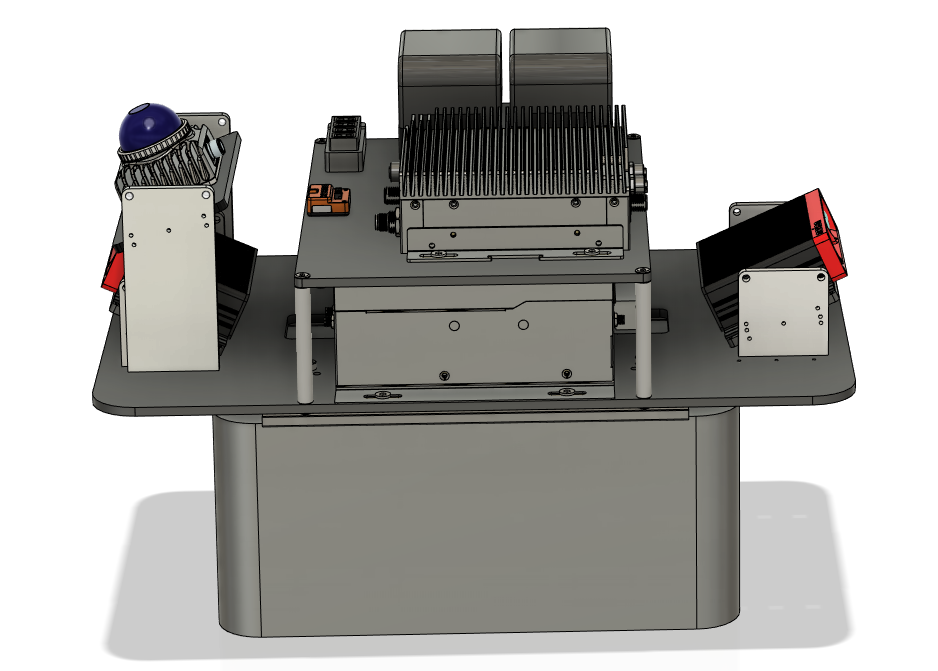
Das Mobile Robot Development Kit
Das Mobile Robot Development Kit (MRDK) von Kudan ist ein integriertes Hardware-Software-Paket, das die Produktentwicklungszyklen mit fortschrittlicher Navigationstechnologie, einschließlich Kudan Grand SLAM, verkürzen soll. Es basiert auf einer modularen Architektur mit austauschbaren Komponenten, so dass der Kunde die optimale Sensoreinstellung und seine eigenen technischen Komponenten nach Bedarf validieren kann.
Zu den wichtigsten Merkmalen von Kudan MRDK gehören:
- Ermöglicht schnelle Integration und reibungslose Funktions- und Leistungsbewertung
- Kann in die kundeneigene Hardwarebasis des mobilen Roboters integrieren oder mit jeder ROS-kompatiblen mobilen Roboterbasis geliefert werden
- Besteht aus einer oder zwei Ruby 3D-Kameras, einer industrietauglichen Recheneinheit und einer Zeitsynchronisationseinheit für eine zuverlässige Datenverarbeitung. 2D/3D-LiDARs, unabhängige IMU und RTK-GNSS-Sensormodule können als optionale Komponenten hinzugefügt werden
- Unterstützt mehrere Chipsatz-Architekturen, X86- und Arm/Jetson-kompatibel
- Unterstützt ROS, einschließlich ROS1 und ROS2