关于Kudan
Kudan于2011年在英国布里斯托尔成立,是商业级即时定位和地图构建(SLAM)技术先驱者。作为全球领先的独立SLAM公司,Kudan 提供专有算法,利用先进的计算机视觉、人工智能和传感器融合技术,实现精密、可靠且节能的定位和地图构建。有关Kudan的更多信息。
移动机器人开发套件
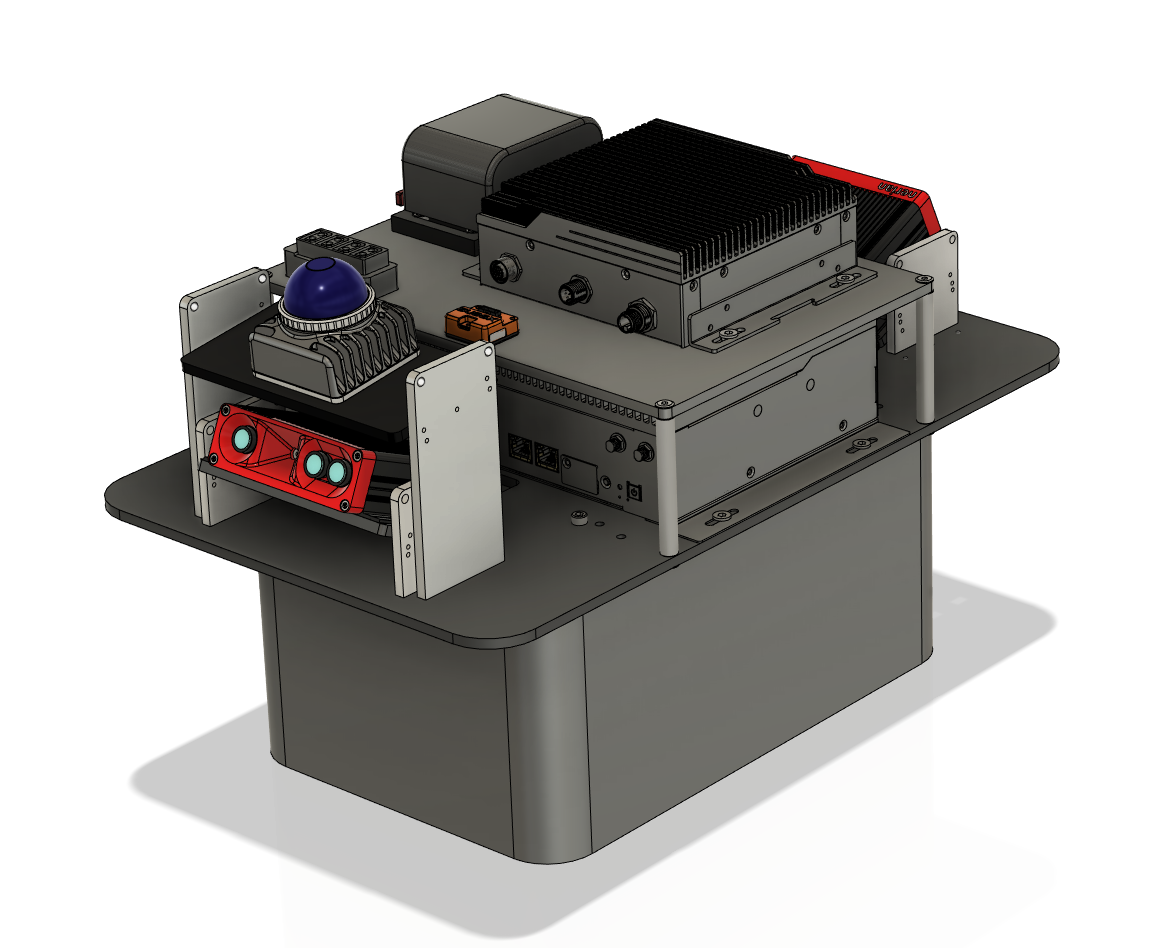
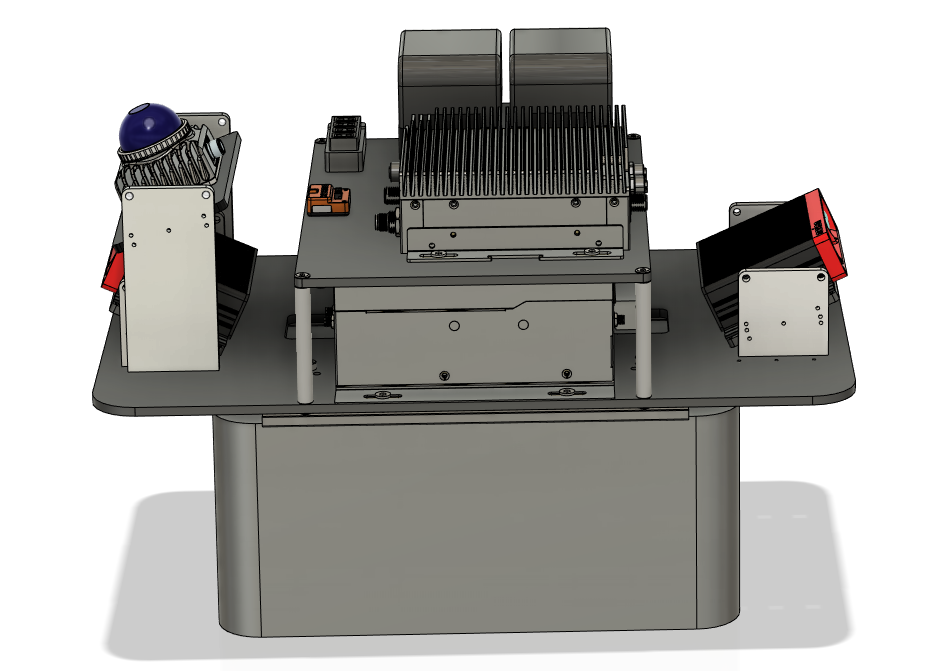
Kudan移动机器人开发套件(MRDK)是一套软硬件集成套件,旨在通过先进的导航技术(包括Kudan Grand SLAM)缩短产品开发周期。此套件基于可更换组件的模块化架构,允许客户根据需要验证更优的传感器设置和自有技术组件。
Kudan MRDK的一些关键特性包括:
- 支持快速集成并顺利开展功能和性能评估
- 可与客户自有移动机器人硬件底座集成,或随附符合ROS标准的移动机器人底座
- 由一或两台Ruby 3D相机、一个工业级计算设备和一个时间同步装置组成,可实现可靠的数据处理2D/3D-LiDAR、独立IMU和RTK-GNSS传感器模块可作为可选组件
- 支持多芯片组架构,兼容X86 和 Arm/Jetson
- 支持ROS,包括ROS1和ROS2