Easy3D-Abgleich
3D-Ausrichtungs- und Inspektionsbibliothek
- Richten Sie ein gescanntes 3D-Objekt an einem anderen Scan oder einem Referenzgitter aus.
- Berechnen Sie die lokalen Abstände zwischen 3D-Scans und einem Referenzgitter oder einer Referenzvorlage.
- Erkennen Sie Anomalien wie falsch platzierte Merkmale, geometrische Verzerrungen, Lücken, Unebenheiten usw.
- Kompatibel mit allen 3D-Sensoren, die Punktwolken, Tiefenkarten oder Höhenkarten erzeugen.
Beschreibung
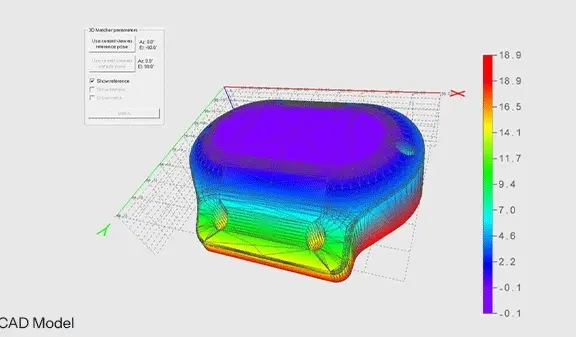
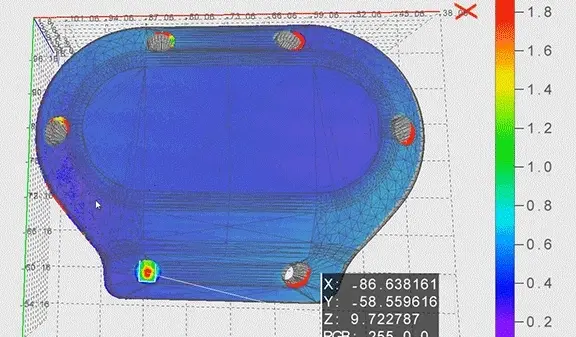
Anomalieerkennung durch Vergleich von 3D-Daten mit einem Referenzmodell
Nach der Ausrichtung der 3D-Daten mit dem Referenzmodell kann Easy3DMatch nach lokalen Abweichungen wie Löchern, Unebenheiten, Kratzern, Lücken usw. suchen. Die Liste der erkannten Anomalien wird zusammen mit ihrer individuellen Position, Entfernung und Fläche zurückgegeben. Mit dem interaktiven Open eVision 3D-Viewer können neue Punktwolken mit Entfernungen und farbigen Daten generiert und angezeigt werden.

Unterstützung von 2D- und 3D-Teilbereichen von Interesse
Beliebige 2D-Bereiche (auf ZMaps) und 3D-Volumen (auf Punktwolken) können verwendet werden, um Teilbereiche von Interesse zu definieren. In diesem Fall wird das gesamte Objekt während des Ausrichtungsprozesses verwendet, aber nur einige Teile werden für den Vergleich und die Erkennung von Anomalien berücksichtigt.

Kompatibilität mit 3D-Sensoren
Die Easy3D-Bibliothek kann Daten von 3D-Sensoren von Drittanbietern wie Automation Technology, Azure Kinect, Benano, Heliotis, IDS Ensenso, Intel Realsense, Lucid Helios, LMI Gocator, Mech-Mind, Nerian Ruby, Photoneo PhoXi, Shenzhen SinceVision (SSZN), Zivid und anderen importieren. Punktwolken und ZMaps werden effizient verwaltet und ermöglichen die Durchführung von 3D-Verarbeitungen und -Analysen.
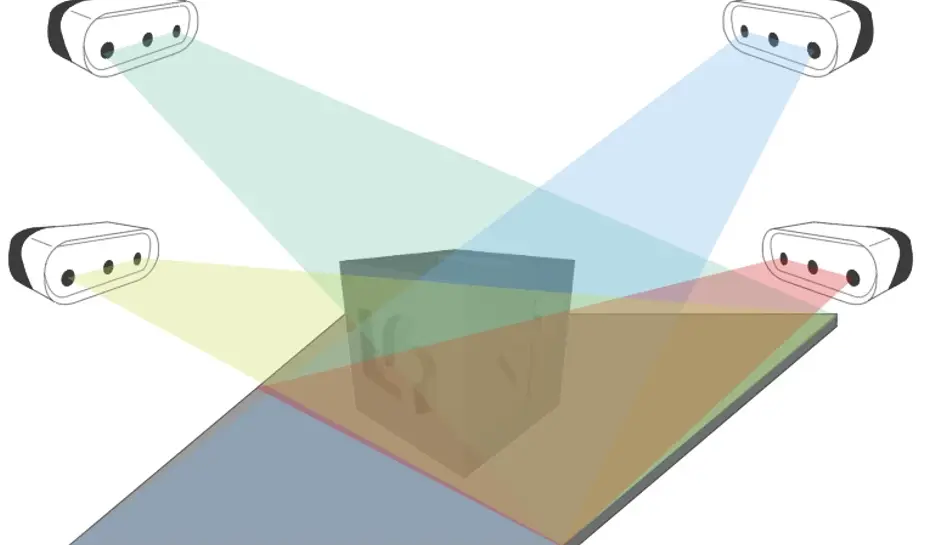
3D-Sensorfusion
3DSensor Fusion ist eine Funktion, die die Zusammenführung von Punktwolken verschiedener Seiten desselben Objekts ermöglicht. Sie können mehrere 3D-Sensoren an verschiedenen Positionen einsetzen, um ein Objekt auf einmal vollständig zu erfassen. Der Prozess gliedert sich in eine Kalibrierungsphase und eine Zusammenführungsphase. Dadurch erfolgt die Zusammenführung schnell und die Kalibrierung ist unabhängig von den Objekten, die Sie erfassen möchten. Das Ergebnis dieses Verfahrens sind optimierte Punktwolken, in denen doppelte Punkte entfernt wurden und alle Attribute (Farben, Normalen usw.) der zusammengeführten Wolken erhalten bleiben.
3D-Betrachter
Verwenden Sie die 3D-Viewer-Klasse von Easy3D, um eine interaktive 3D-Anzeige zu erstellen. Der 3D-Viewer kann Punktwolken und 3D-Objekte anzeigen. Er verwendet die OpenGL-Schnittstelle und erfordert ein kompatibles Anzeigegerät.
Weitere Vorteile
Neo-Lizenzierungssystem
Neo ist das neue Lizenzierungssystem. Es ist zuverlässig, auf dem neuesten Stand der Technik und steht nun für die Speicherung von Open eVision- und eGrabber-Lizenzen zur Verfügung. Mit Neo können Sie wählen, wo Sie Ihre Lizenzen aktivieren möchten, entweder auf einem Neo-Dongle oder in einem Neo-Software-Container. Sie kaufen eine Lizenz und entscheiden später.
Neo-Dongles bieten robuste Hardware und die Flexibilität, von einem Computer auf einen anderen übertragen zu werden. Neo-Software-Container benötigen keine spezielle Hardware, sondern sind mit dem Computer verbunden, auf dem sie aktiviert wurden.
Neo wird mit einem eigenen, dedizierten Neo License Manager ausgeliefert, der in zwei Varianten erhältlich ist: einer intuitiven, benutzerfreundlichen grafischen Benutzeroberfläche und einer Befehlszeilenschnittstelle, die eine einfache Automatisierung der Neo-Lizenzierungsverfahren ermöglicht.
Alle eVision-Bibliotheken für Windows und Linux
- Microsoft Windows 11, 10 für x86-64 (64-Bit) Prozessorarchitektur
- Microsoft Windows 11, 10 IoT Enterprise auf x86_64-Systemen
- Linux für x86-64 (64-Bit) und ARMv8-A (64-Bit) Prozessorarchitekturen mit einer glibc-Version größer oder gleich 2.18

Open eVision 3D Studio
Open eVision 3D Studio ist die Evaluierungs- und Prototyping-Anwendung von Open eVision.
Die Anwendung Open eVision 3D Studio vereinfacht die Konfiguration von einzelnen und doppelten 3D-Laserlinien-Inspektionssystemen unter Verwendung des Coaxlink Quad 3D-LLE-Framegrabber sowie der Bibliotheken Easy3D und Easy3DLaserLine erheblich.
Open eVision 3D Studio ist kostenlos und erfordert keine Lizenz.