Easy3DMatch
3D对准与检测库
- 将扫描的3D物体与另一组扫描数据或参考网格对齐
- 计算3D扫描数据与黄金样本或参考网格之间的局部距离
- 检测异常情况,如特征错位、几何变形、间隙、凸起等
- 兼容所有可生成点云、深度图或高度图的3D传感器
描述
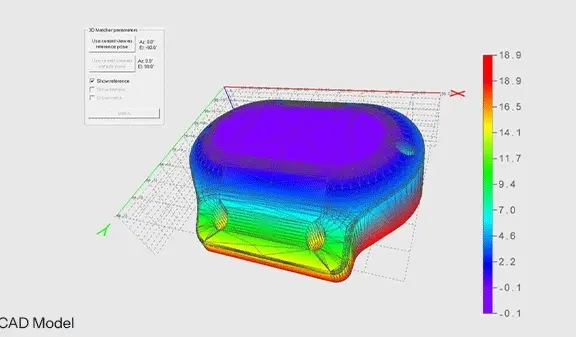
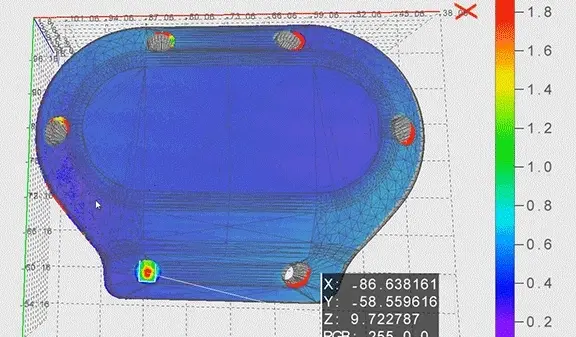
通过将3D数据与参考模型进行比较实现异常检测
在将3D数据与参考模型对齐后,Easy3DMatch可搜索局部差异,如孔洞、凸起、划痕、间隙等。系统将返回检测到的异常列表,并标注其具体位置、距离及面积。通过交互式Open eVision 3D查看器,可生成并显示带有距离信息和彩色数据的新点云。

支持感兴趣的2D和3D子域
任意二维区域(基于ZMaps)和三维体积(基于点云)可用于定义感兴趣子域。此时,对齐过程中会使用整个对象,但仅部分区域会被纳入比较和异常检测的考量范围。

与3D传感器的兼容性
Easy3D库能够导入来自自动化技术、Azure Kinect、Benano、Heliotis、IDS Ensenso、英特尔RealSense、Lucid Helios、LMI Gocator、Mech-Mind、Nerian Ruby、Photoneo PhoXi、深圳森视(SSZN)、Zivid等第三方3D传感器的数据。 该库高效管理点云和Z地图数据,支持执行三维处理与分析操作。
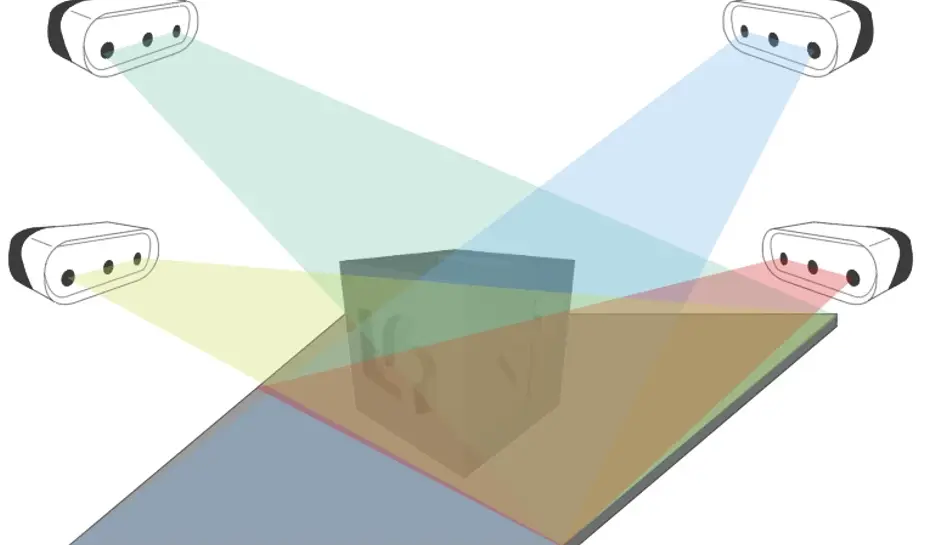
3D传感器融合
3D传感器融合功能可实现同一物体不同视角点云的合并。 通过在多个位置放置若干3D传感器,可一次性获取完整物体数据。该过程分为校准阶段与融合阶段:校准过程独立于待采集物体,确保融合速度快;最终生成的优化点云不仅去除了重复点,还完整保留了融合后点云的所有属性(颜色、法线等)。
3D查看器
使用Easy3D的3D查看器类创建交互式3D显示。该3D查看器可显示点云和3D对象,采用OpenGL接口,并需要兼容的显示设备。
其他福利
新许可系统
Neo 是全新的授权系统。它可靠且技术先进,现已支持存储 Open eVision 和 eGrabber 授权。Neo 允许您选择授权激活方式:可通过 Neo 硬件密钥或 Neo 软件容器激活。购买授权后,您可随时决定激活方式。
Neo加密狗提供坚固的硬件支持,可灵活转移至不同计算机使用。Neo软件容器无需专用硬件,仅与激活所在的计算机绑定。
Neo自带专属许可证管理器,提供两种操作模式:直观易用的图形用户界面,以及可轻松自动化Neo许可证流程的命令行界面。
适用于Windows和Linux的所有Open eVision库
- Microsoft Windows 11、10 适用于 x86-64(64 位)处理器架构
- Microsoft Windows 11、10 IoT Enterprise 适用于 x86_64 系统
- 适用于 x86-64(64 位)和 ARMv8-A(64 位)处理器架构的 Linux,需使用 glibc 2.18 及以上版本

Open eVision 3D Studio
Open eVision 3D Studio 是 Open eVision 的三维评估与原型设计应用工具。
该应用通过采用 Coaxlink Quad 3D-LLE 图像采集卡以及 Easy3D 和 Easy3DLaserLine 库,极大简化了单通道与双通道三维激光线检测系统的配置流程。
Open eVision 3D Studio 完全免费,无需任何许可证。
Software
- Host PC Operating System
-
Open eVision is a set of 64-bit libraries that require an Intel compatible processor with the SSE4 instruction set or an ARMv8-A compatible processor.
Open eVision can be used on the following operating systems:
Microsoft Windows 11, 10 for x86-64 (64-bit) processor architecture
Microsoft Windows 11, 10 IoT Enterprise for x86-64 systems
Linux for x86-64 (64-bit) and ARMv8-A (64-bit) processor architectures with a glibc version greater or equal to 2.18
Remote connections
Remote connections are allowed using remote desktop, TeamViewer or any other similar software.
Virtual machines
Virtual machines are supported. Microsoft Hyper-V, Oracle VirtualBox and libvirt hypervisors have been successfully tested.
Only the Neo Licensing System is compatible with virtualization.
Minimum requirements:
2 GB RAM to run an Open eVision application
8 GB RAM to compile an Open eVision application
Between 100 MB and 2 GB free hard disk space for libraries, depending on selected options.
- APIs
-
Supported programming languages :
The Open eVision libraries and tools support C++, Python and the programming languages compatible with the .NET (C#, VB.NET)
C++ requirements: A compiler compatible with the C++ 11 standard is required to use Open eVision
Python requirements: Python 3.11 or later is required to use the Python bindings for Open eVision
.NET requirements: .NET framework 4.8 (or later) or the .NET platform 6.0 (or later) are supported
Supported Integrated Development Environments:
Microsoft Visual Studio 2017 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2019 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2022 (C++, C#, VB .NET, C++/CLI)
QtCreator 4.15 with Qt 5.12
Ordering Information
- Product status
-
Released
- Product code - Description
-
PC4184 Open Easy3DMatch for USB dongle
PC4334 Open eVision Easy3DMatch
- Included libraries
-
Easy3D
Easy3DMatch
- Related products
-
PC6512 eVision/Open eVision USB Dongle (empty)
PC6514 Neo USB Dongle (empty)