易配
模式匹配函式庫
- 採用正規化相關性進行圖案匹配
- 亞像素級精準度
- 支援旋轉與縮放功能
- 可偵測多重圖案出現
- 支援灰階與彩色影像
- 支援「無關區域」處理
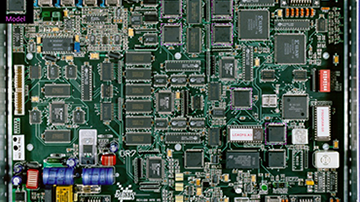
描述
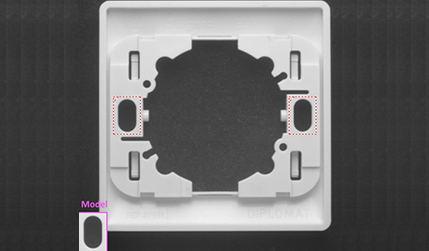
EasyMatch 是一款灰階與彩色圖案比對函式庫。它能讓您透過參考圖案訓練系統,隨後在其他影像中定位該圖案的出現位置。當特定零件在視野中的位置未知,或需確認零件是否存在時,此工具便顯得極為便利。該函式庫採用歸一化相關法運作,即透過測量參考圖案與目標影像之間的差異來實現比對。
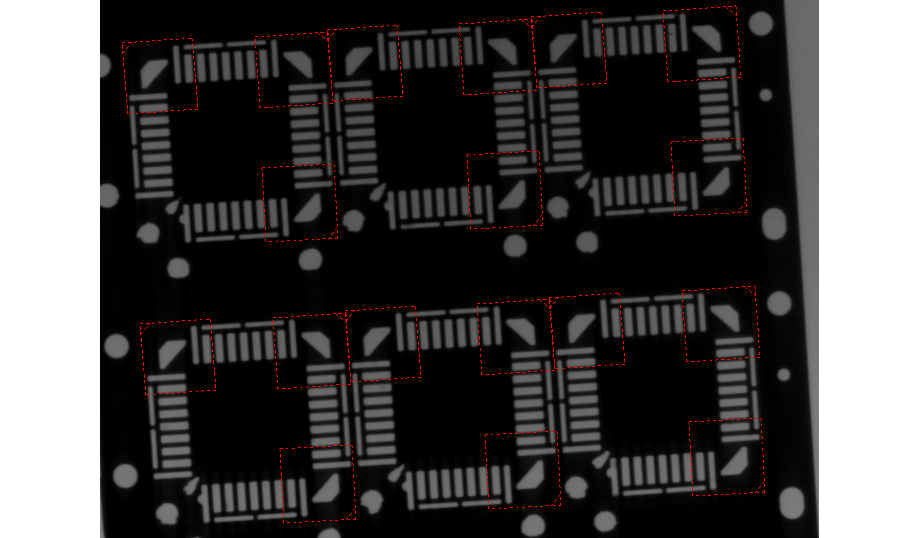
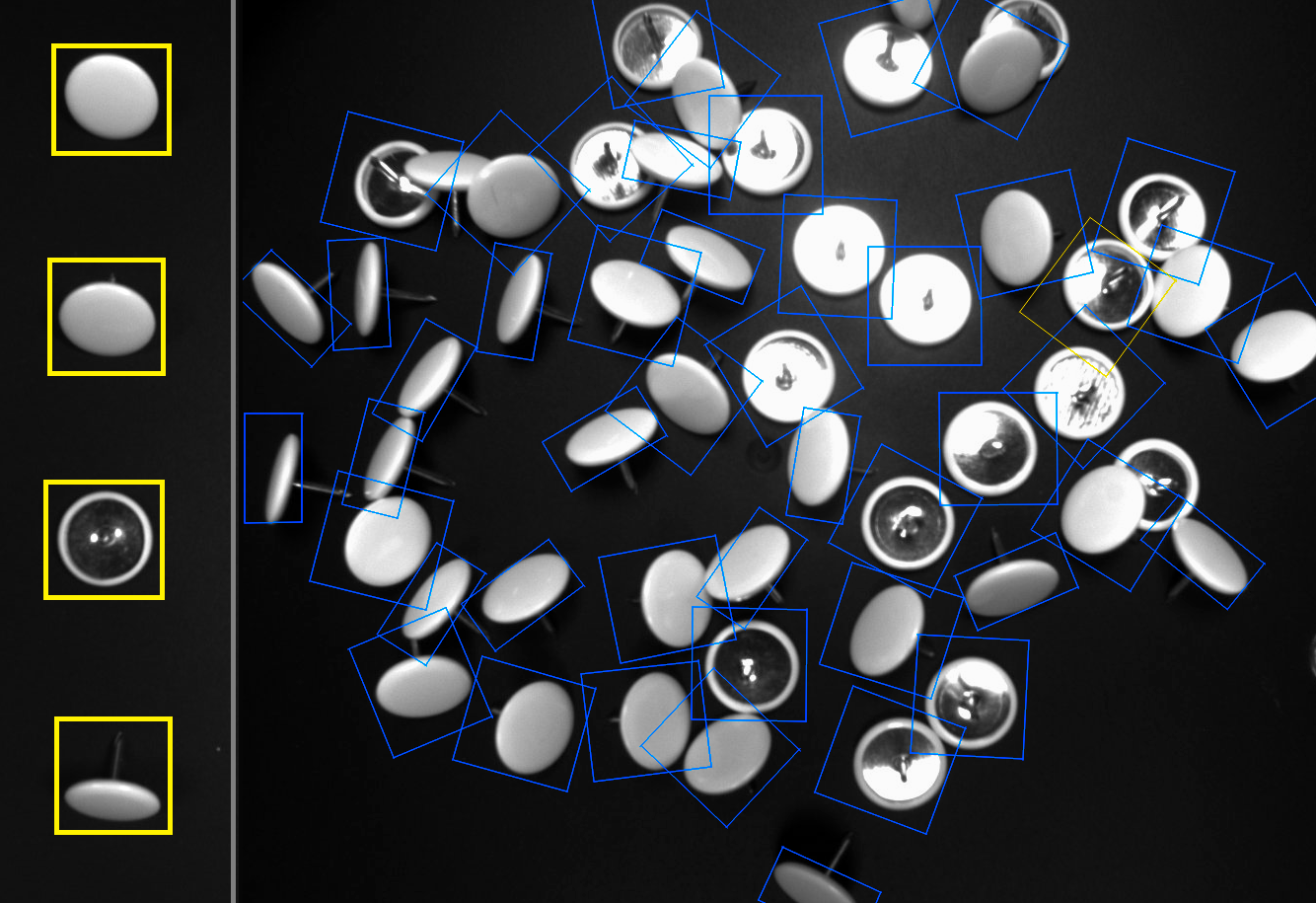
多重模式出現
EasyMatch 能夠找到多個模式的出現位置,最多可達使用者定義的數量。
標準、偏移歸一化、增益歸一化及完全歸一化相關性
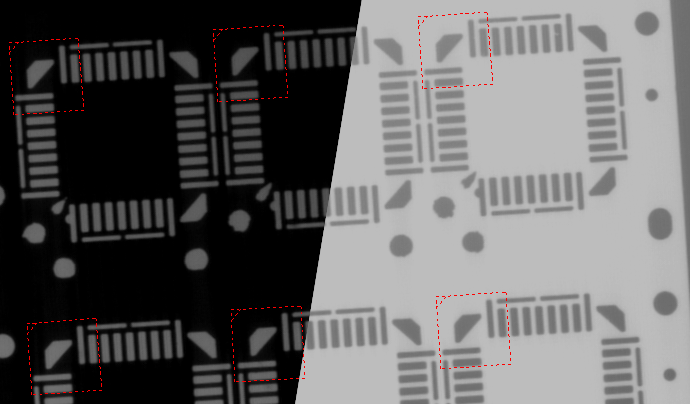
相關性計算基於灰階或彩色影像進行。為因應圖案光照變化,圖案影像需進行歸一化處理。EasyMatch提供四種歸一化模式,取決於是否採用灰階增益及/或偏移量補償。
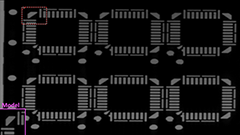
常規對比、反轉對比或混合對比
由於特定的光照效果,物體可能呈現反轉對比(白色背景上的黑色圖案,而非黑色背景上的白色圖案,或反之)。根據應用情境,保留反轉實例或忽略它們皆可能具有實用價值。系統提供三種對比模式:僅考慮正向實例、僅考慮負向實例,或同時考慮兩者。
平移、旋轉與各向同性/各向異性縮放
為尋求圖案與目標影像間的最佳匹配,目標可進行水平與垂直方向的平移。此外,目標可同時或獨立地進行旋轉及/或在X、Y方向上變換比例。旋轉角度與比例因子可在使用者指定的區間內變化。所有自由度皆可自由組合運用。
可變精度,最高可達次像素級
測量圖案的精確度可自由選擇(精度越低,速度越快)。可實現達至十分之一像素的精準度。
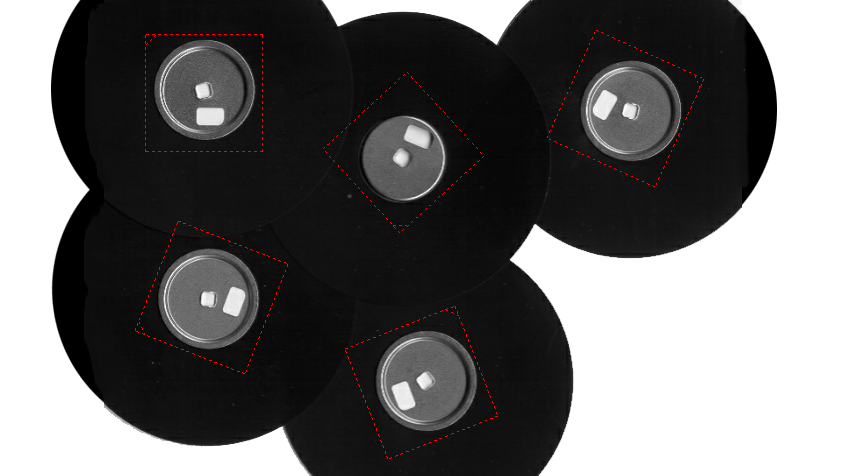
針對任意區域進行學習與搜尋
EasyMatch 支援「自訂區域」功能,讓您能夠精確(精確到像素)地選取圖案和/或搜尋區域中應納入考量的一部分或多部分。如此一來,您可以聚焦於特定部分或忽略其他部分,從而完全掌控要尋找的內容及其位置。

透過多種模式學習
EasyMatch 能夠從多種圖案中學習,使其在面對照明、視角或變形等變化時更具抗干擾能力。它還能透過多種圖案變體來定位物體——例如,印有不同標誌的零件,或是硬幣的正面與背面。
灰階與彩色影像
EasyMatch 既可處理 8 位元灰階影像,也能處理 24 位元 RGB 影像。
非正方形像素
當以非正方形像素擷取影像時,旋轉的物體會顯得扭曲。若能將像素長寬比納入考量,便可補償此現象。
其他福利
新授權系統
Neo 是全新的授權系統。它具備可靠性與尖端技術,現已可用於儲存 Open eVision 與 eGrabber 的授權。Neo 允許您選擇授權的啟用位置,無論是 Neo 硬體授權卡或 Neo 軟體容器皆可。您先購買授權,後續再決定啟用方式。
Neo 硬體授權器具備堅固耐用的硬體結構,可靈活在不同電腦間轉移使用。Neo 軟體授權容器則無需專用硬體,而是與其啟用所在的電腦綁定。
Neo隨附專屬的Neo授權管理器,提供兩種操作模式:直覺易用的圖形化使用者介面,以及可自動化執行Neo授權流程的命令列介面。
所有適用於 Windows 與 Linux 的 eVision 函式庫
- Microsoft Windows 11、10 適用於 x86-64 (64 位元) 處理器架構
- Microsoft Windows 11、10 IoT Enterprise 適用於 x86_64 系統
- 適用於 x86-64(64 位元)及 ARMv8-A(64 位元)處理器架構的 Linux,需具備 glibc 2.18 或更高版本

開啟eVision Studio
Open eVision Studio 是 Open eVision 的評估、原型設計與開發工具。
其直觀的圖形使用者介面讓您能調用 eVision 的任何 2D 影像處理功能,並立即檢視結果。內建的腳本功能可自動生成對應程式碼,您可直接複製貼上至應用程式中。
Open eVision Studio 完全免費(需搭配 Open eVision 2.0 及以上版本使用),且無需任何授權許可。